ROS2 PYTHON Script Pamoja Na Mchapishaji na Majiri – Swahili ROS Tutorial
This tutorial is created by Rosbotics Ambassador 021 Kevin
Rosbotics Ambassador Program https://www.theconstruct.ai/rosbotics-ambassador/)
Mambo tunaenda kujifunza
- Jinsi ya kutengeneza rosject
- Jinsi ya kutengeneza kifurushi ya ROS2.
- Jinsi ya kuunda hati ya python..
- Jinsi ya kutengeneza mchapishaji.
- Jinsi ya kutengeneza mteja.
- Jinsi ya kujenga nafasi ya kazi ya ROS2..
Orodha ya rasilimali zilizotumiwa katika chapisho hili
- The Construct: https://app.theconstructsim.com/
- ROS2 Courses –▸
- ROS2 Basics in 5 Days Humble (Python): https://app.theconstructsim.com/Course/132
Muhtasari.
ROS (Mfumo wa Uendeshaji wa Roboti) unakuwa “mfumo” wa kawaida wa roboti za kutengeneza programu. Katika chapisho hili, hebu tujifunze jinsi ya kuunda kifurushi cha ROS2, muhimu kwa kutoa maagizo kwa roboti, kwa kutumia amri ya ros2.
Kutengeneza rosject
Ili kufuata mafunzo haya, tunahitaji kuwa na ROS2 iliyosakinishwa katika mfumo wetu, na kwa hakika ros2_ws (ROS2 Workspace). Ili kurahisisha maisha yako, tutaunda mpango wa kubofya kiungo hiki: https://app.theconstructsim.com/
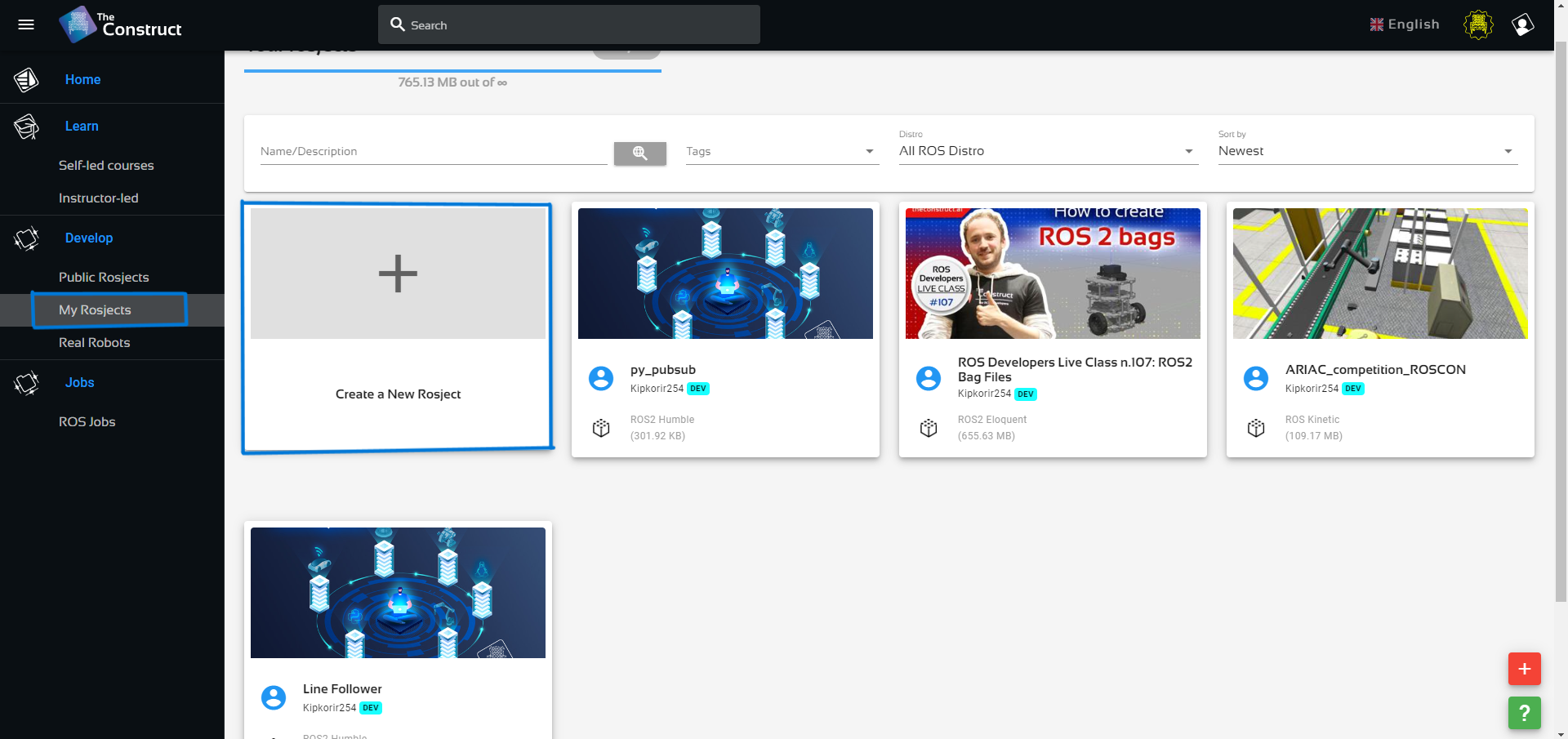
Hii inakuleta kwenye ukurasa wa kutua wa kuunda, hapo tutaenda kwa myrosjects na kisha kuunda rosject mpya, hatua zimeangaziwa katika miraba ya bluu.
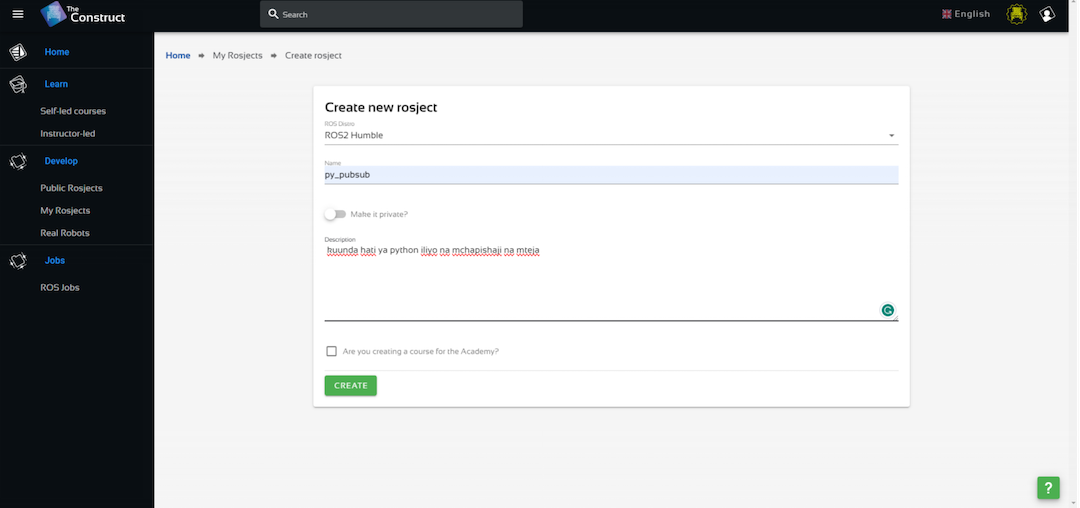
Baada ya kuunda rosject mpya, weka usambazaji ambao ungependa kutumia kwa kesi yetu Humble na jina la rosject na maelezo mafupi.
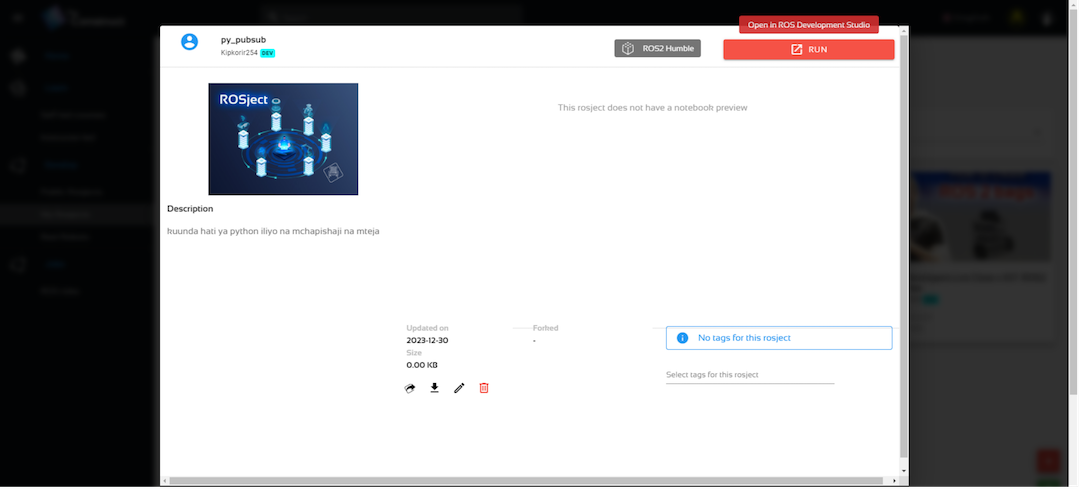
Baada ya kubonyeza kitufe cha Unda, unapaswa kuwa na rosject kwenye rosjects zangu Bonyeza na ubonyeze RUN.
Kuunda kifurushi cha ros2.
Ili kuunda kifurushi cha ROS2, tunahitaji kuwa na Nafasi ya Kazi ya ROS2, na kwa hiyo, tunahitaji terminal.
Wacha tufungue terminal kwa kubofya kitufe cha Fungua terminal mpya.
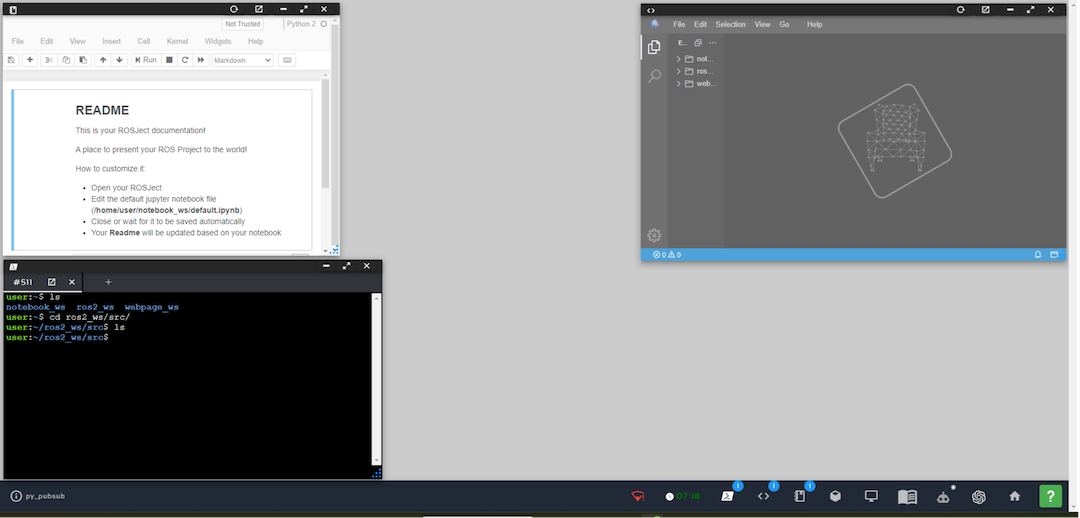
Mara tu ndani ya terminal tumia amri kuona vitu vilivyopo kwenye saraka ya sasa:
ls
Kisha nenda kwenye saraka ifuatayo ambapo tutaunda kifurushi:
cd ros2_ws/src
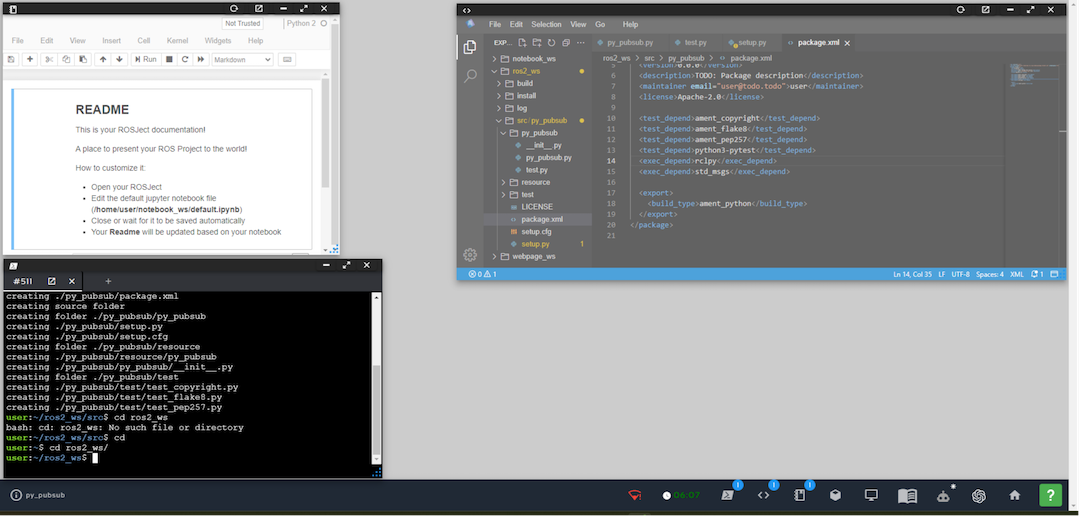
Tumia amri ifuatayo kuunda kifurushi cha python:
ros2 pkg create --build-type ament_python --license Apache-2.0 py_pubsub
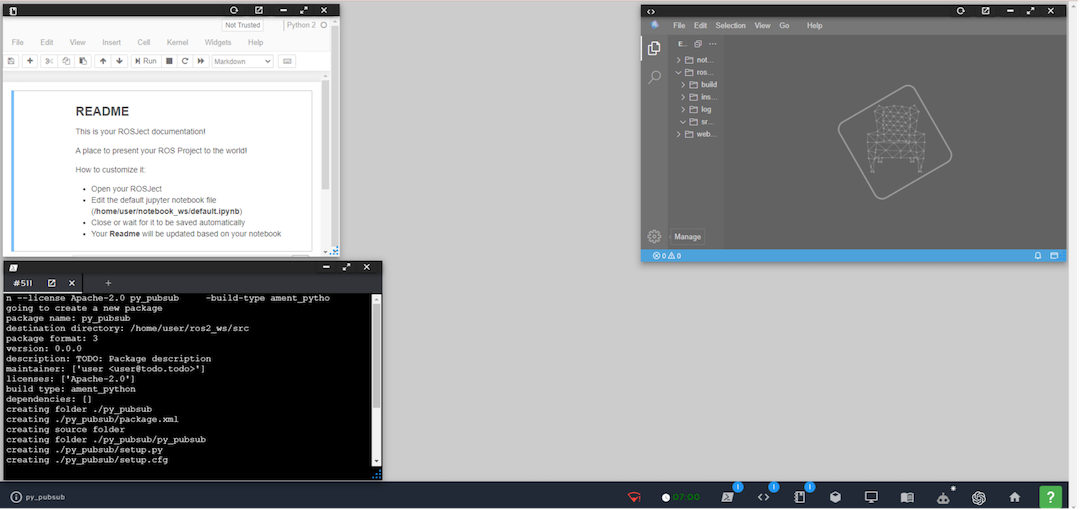
Pamoja na hayo umeunda kifurushi cha python ROS2.
Kuunda hati ya python.
Fungua kihariri cha msimbo kulia na uunde hati kwenye py_pubsub fille inayoitwa py_pubsub.py. Hii inafanywa kwa kubofya kulia kwenye py_pubsub na kubofya kuunda faili mpya
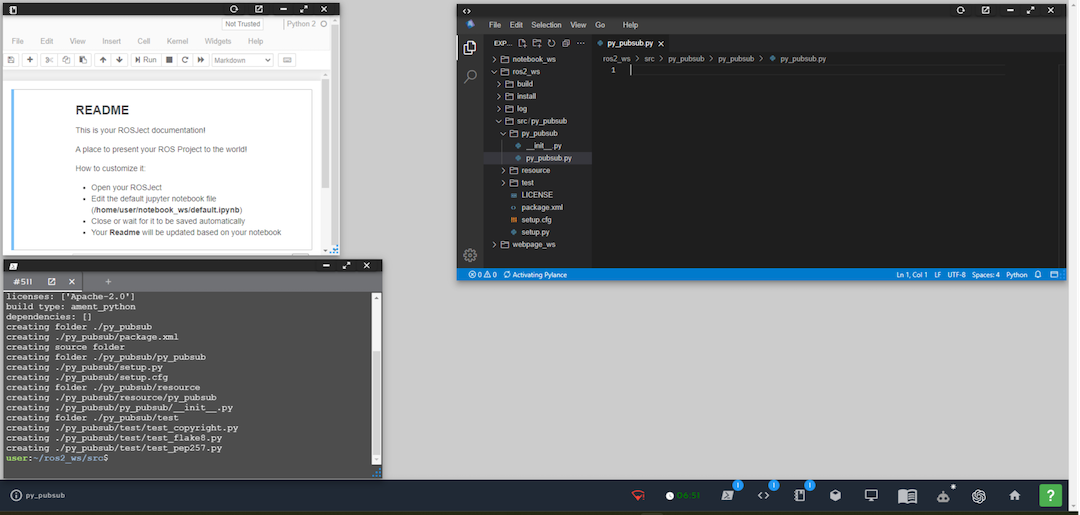
Nakili na ubandike yafuatayo na hati ya python ambayo ina mchapishaji na aliyejiandikisha kwenye hati yetu
| import rclpy import math from rclpy.node import Node from std_msgs.msg import Float32 class MyNode(Node): def __init__(self): super().__init__(‘my_node’) self.subscription = self.create_subscription(Float32, ‘input_topic’, self.listener_callback, 10) self.publisher = self.create_publisher(Float32, ‘output_topic’, 10) def listener_callback(self, msg): radians = msg.data degrees = radians * 180 / math.pi self.publisher.publish(Float32(data=degrees)) def main(args=None): rclpy.init(args=args) node = MyNode() rclpy.spin(node) node.destroy_node() rclpy.shutdown() if __name__ == ‘__main__’: main() |
Kisha ongeza laini ifuatayo kwenye setup.py kwenye sehemu ya kuingilia.
‘talker = py_pubsub.py_pubsub:main’
Faili ya stepup.py inapaswa kuonekana kama ifuatavyo:
| from setuptools import setup package_name = ‘py_pubsub’ setup( name=package_name, version=’0.0.0′, packages=[package_name], data_files=[ (‘share/ament_index/resource_index/packages’, [‘resource/’ + package_name]), (‘share/’ + package_name, [‘package.xml’]), ], install_requires=[‘setuptools’], zip_safe=True, maintainer=’user’, maintainer_email=’user@todo.todo’, description=’TODO: Package description’, license=’Apache-2.0′, tests_require=[‘pytest’], entry_points={ ‘console_scripts’: [ ‘talker = py_pubsub.pypubsub:main’, ], }, ) |
Kuunda hati ya pili ya python
Hati hii mpya tunayopaswa kuunda itatumika kujaribu ya awali ili kuhakikisha kwamba mchapishaji na anayejisajili wanaendesha vyema.
Unda faili mpya kama hapo awali iliitwa test.py
Nakili na ubandike msimbo ufuatao
| import rclpy from rclpy.node import Node import math from std_msgs.msg import Float32 class MinimalPublisher(Node): def __init__(self): super().__init__(‘minimal_publisher’) self.publisher_ = self.create_publisher(Float32, ‘input_topic’, 10) timer_period = 0.5 # seconds self.timer = self.create_timer(timer_period, self.timer_callback) self.i = 0.0 def timer_callback(self): msg = Float32() msg.data = self.i self.publisher_.publish(msg) self.get_logger().info(‘Publishing: “%s”‘ % msg.data) if(self.i > math.pi): self.i = 0 self.i += 0.01 def main(args=None): rclpy.init(args=args) minimal_publisher = MinimalPublisher() rclpy.spin(minimal_publisher) # Destroy the node explicitly # (optional – otherwise it will be done automatically # when the garbage collector destroys the node object) minimal_publisher.destroy_node() rclpy.shutdown() if __name__ == ‘__main__’: main() |
Hati hii hutumia kipima muda baada ya kila sekunde 0.5 ili kuchapisha ujumbe kwa digrii kwenye mada inayoitwa input_topic.
Ongeza amri ifuatayo kwa setup.py yako
| ‘test = py_pubsub.test:main’, |
Faili yako ya setup.py sasa inapaswa kuonekana kama hii
| from setuptools import setup package_name = ‘py_pubsub’ setup( name=package_name, version=’0.0.0′, packages=[package_name], data_files=[ (‘share/ament_index/resource_index/packages’, [‘resource/’ + package_name]), (‘share/’ + package_name, [‘package.xml’]), ], install_requires=[‘setuptools’], zip_safe=True, maintainer=’user’, maintainer_email=’user@todo.todo’, description=’TODO: Package description’, license=’Apache-2.0′, tests_require=[‘pytest’], entry_points={ ‘console_scripts’: [ ‘talker = py_pubsub.py_pubsub:main’ ‘test = py_pubsub.test:main’, ], }, ) |
Ongeza mabadiliko yafuatayo kwenye package.xml yako
| <exec_depend>rclpy</exec_depend> <exec_depend>std_msgs</exec_depend> |
Sasa kifurushi chako.xml kinapaswa kuwa kama ifuatavyo
| <?xml version=“1.0”?> <?xml-model href=“http://download.ros.org/schema/package_format3.xsd” schematypens=“http://www.w3.org/2001/XMLSchema”?> <package format=“3”> <name>py_pubsub</name> <version>0.0.0</version> <description>TODO: Package description</description> <maintainer email=“user@todo.todo”>user</maintainer> <license>Apache-2.0</license> <test_depend>ament_copyright</test_depend> <test_depend>ament_flake8</test_depend> <test_depend>ament_pep257</test_depend> <test_depend>python3-pytest</test_depend> <exec_depend>rclpy</exec_depend> <exec_depend>std_msgs</exec_depend> <export> <build_type>ament_python</build_type> </export> </package> |
Kuunda vifurushi vyetu vya ros2
Ingiza amri ifuatayo kwenye terminal
| cd cd ros2_ws |
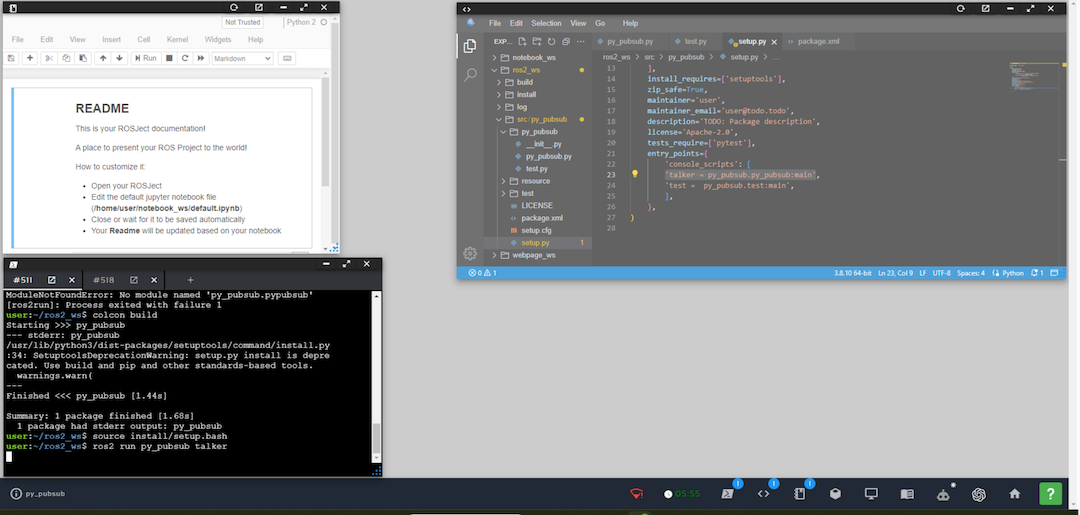
Ingiza amri zifuatazo
| colcon build source install/setup.bash |
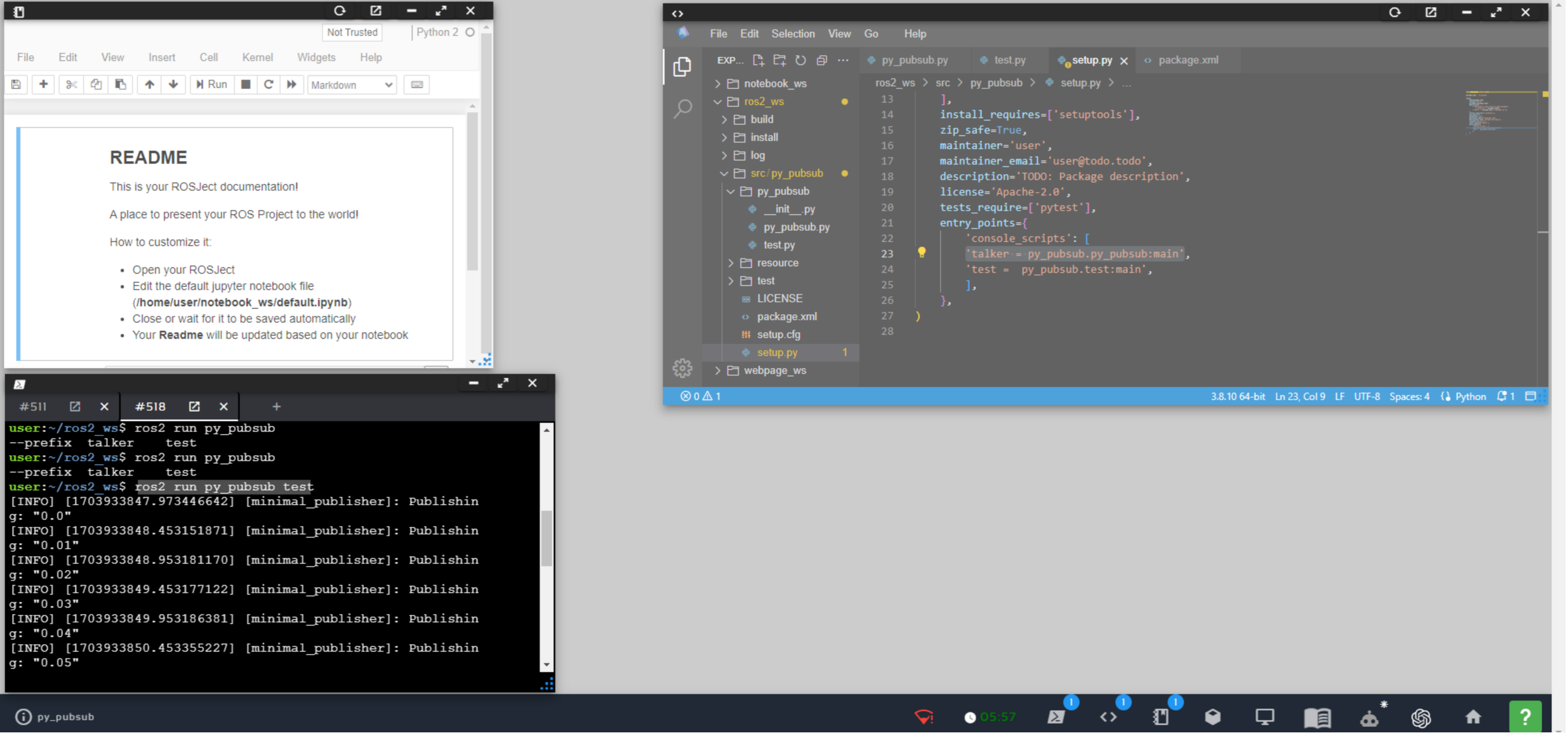
Kujaribu nodi mbili
Katika terminal ya kwanza kukimbia
| ros2 run py_pubsub talker |
Katika terminal ya pili endesha amri zifuatazo
| cd ros2_ws source install/setup.bash ros2 run py_pubsub test |
Unaweza basi katika kukimbia kwa terminal ya tatu
| ros2 topic list ros2 topic echo /output_topic |
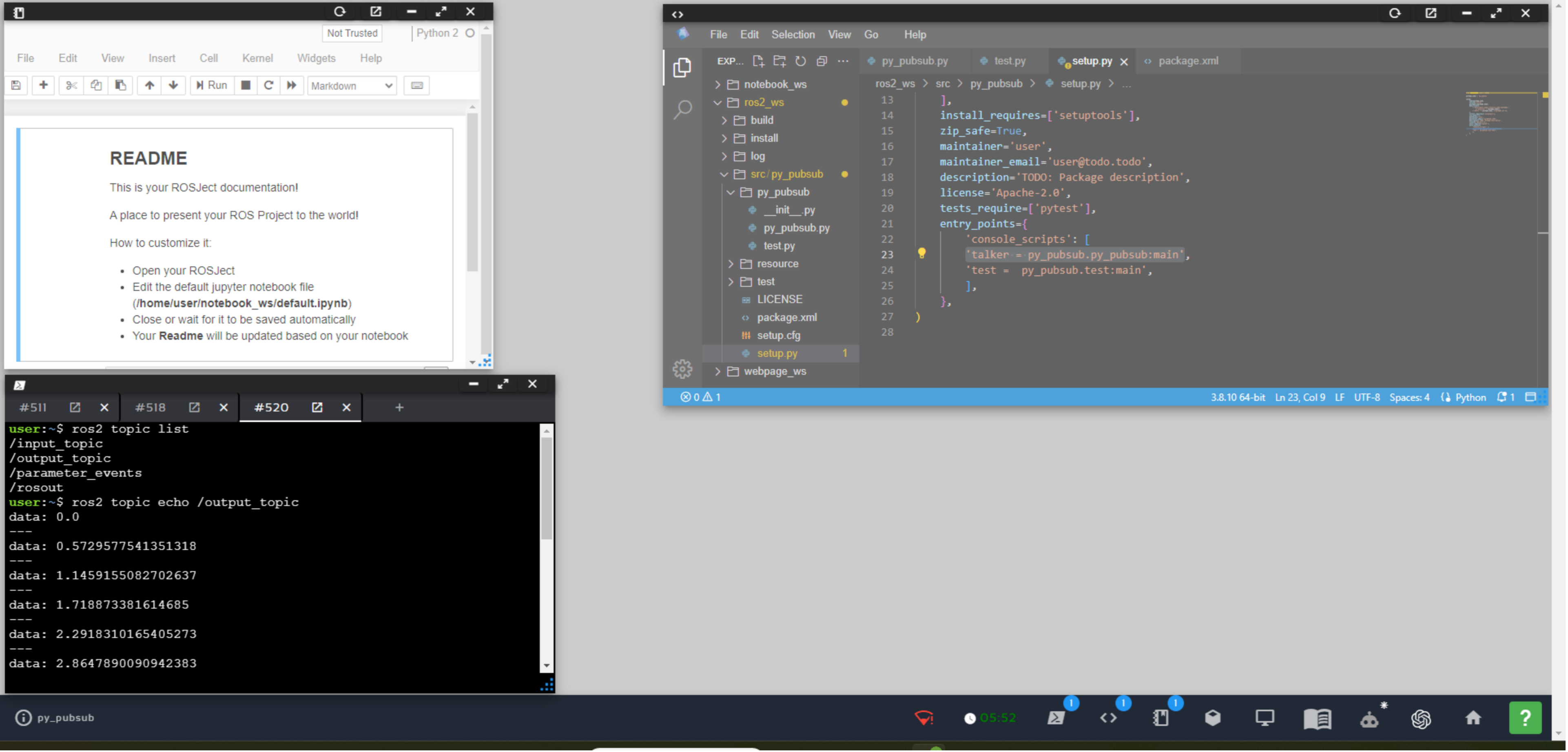
Pamoja na hayo, tumethibitisha kwamba nodi mbili zinafanya kazi, Hapa kuna kiunga cha rosject https://app.theconstructsim.com/Desktop
Kozi & Mafunzo Husika
Ikiwa unataka kujifunza zaidi kuhusu ROS na ROS2, tunapendekeza kozi zifuatazo:
- ROS2 Basics in 5 Days Humble (Python): https://app.theconstructsim.com/Course/132
- ROS2 Basics in 5 Days Humble (C++): https://app.theconstructsim.com/Course/133
- Open-RMF / Fleet Management Training: https://www.theconstruct.ai/robot-fleet-management-ros2-open-rmf-training/