

ROS Was Created to Solve a Fundamental Robotics Problem
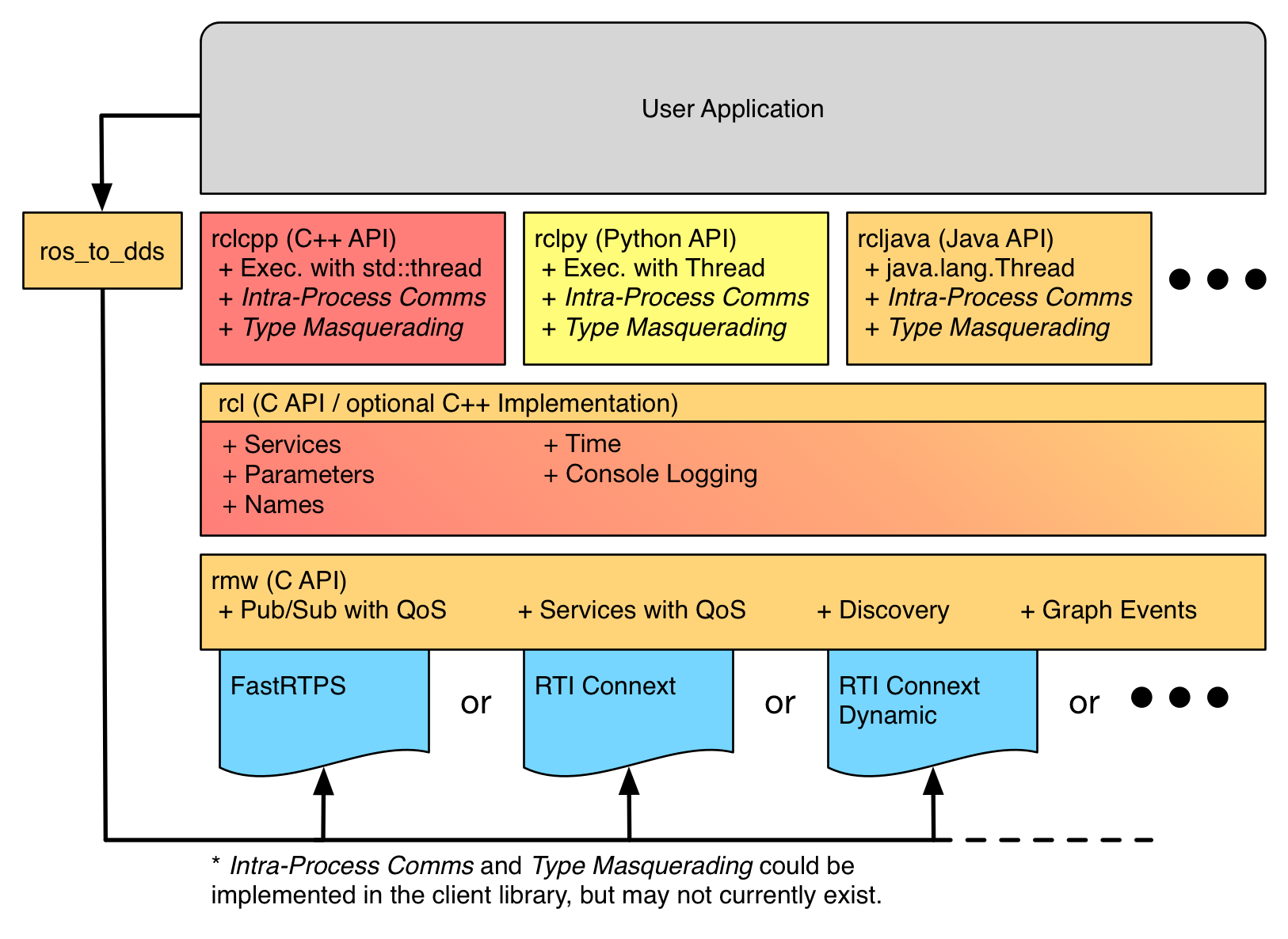
The name Robot Operating System is slightly misleading. ROS is not an operating system. It runs on top of Linux and functions more like a middleware framework—a collection of drivers, communication tools, and infrastructure that makes robotics software reusable across different platforms.
Understanding this single idea makes the rest of ROS much easier to understand.
Before ROS existed, robotics development was highly fragmented. Different robots used different sensors, motors, communication protocols, and software interfaces. As a result, developers often had to rewrite the same software every time they worked with a new robot. A navigation algorithm that worked perfectly on one platform usually couldn’t be transferred to another without significant modification.
ROS was designed to eliminate this problem by introducing a hardware abstraction layer through ROS drivers.
A useful analogy is how printers work on Windows. Applications like Microsoft Word never communicate directly with the printer hardware. Instead, they communicate through a printer driver. As long as the correct driver exists, the same print command works regardless of which printer is connected.
ROS applies exactly the same principle to robotics. Control software communicates with standardized ROS interfaces instead of directly interacting with hardware. As long as a robot provides ROS-compatible drivers, the same control program can run on completely different robotic platforms.
Why ROS Became the Standard Robotics Framework
Hardware abstraction is only one advantage.
Another major benefit is that developers no longer need to reinvent common robotics solutions. Many of the most difficult problems in robotics already have mature, open-source ROS packages maintained by the community. Navigation, motion planning with MoveIt, and visualization through RViz are all readily available. Instead of rebuilding these systems from scratch, developers can focus on solving new problems.
ROS also avoids locking developers into a single programming language. Individual ROS nodes can be written in Python or C++, allowing rapid development where flexibility matters while still achieving high performance where computational efficiency is required.
Perhaps the most underrated feature is simulation.
ROS integrates seamlessly with simulation tools such as Gazebo, allowing complete robotic systems to be tested before deploying them on real hardware. Entire robots—even ones that are not physically available—can be simulated, making robotics development accessible without owning expensive equipment.
cr. Génération Robots
ROS Is Used Far Beyond Research Labs
ROS is often associated with universities, but its impact extends far beyond academic research.
As a professor at Carnegie Mellon University once described it, ROS has become the lingua franca of robotics, providing a common framework for connecting sensors, actuators, and processing systems. Without ROS, even relatively simple robotics projects require significantly more engineering effort.
Today, ROS is used across a wide range of industries.
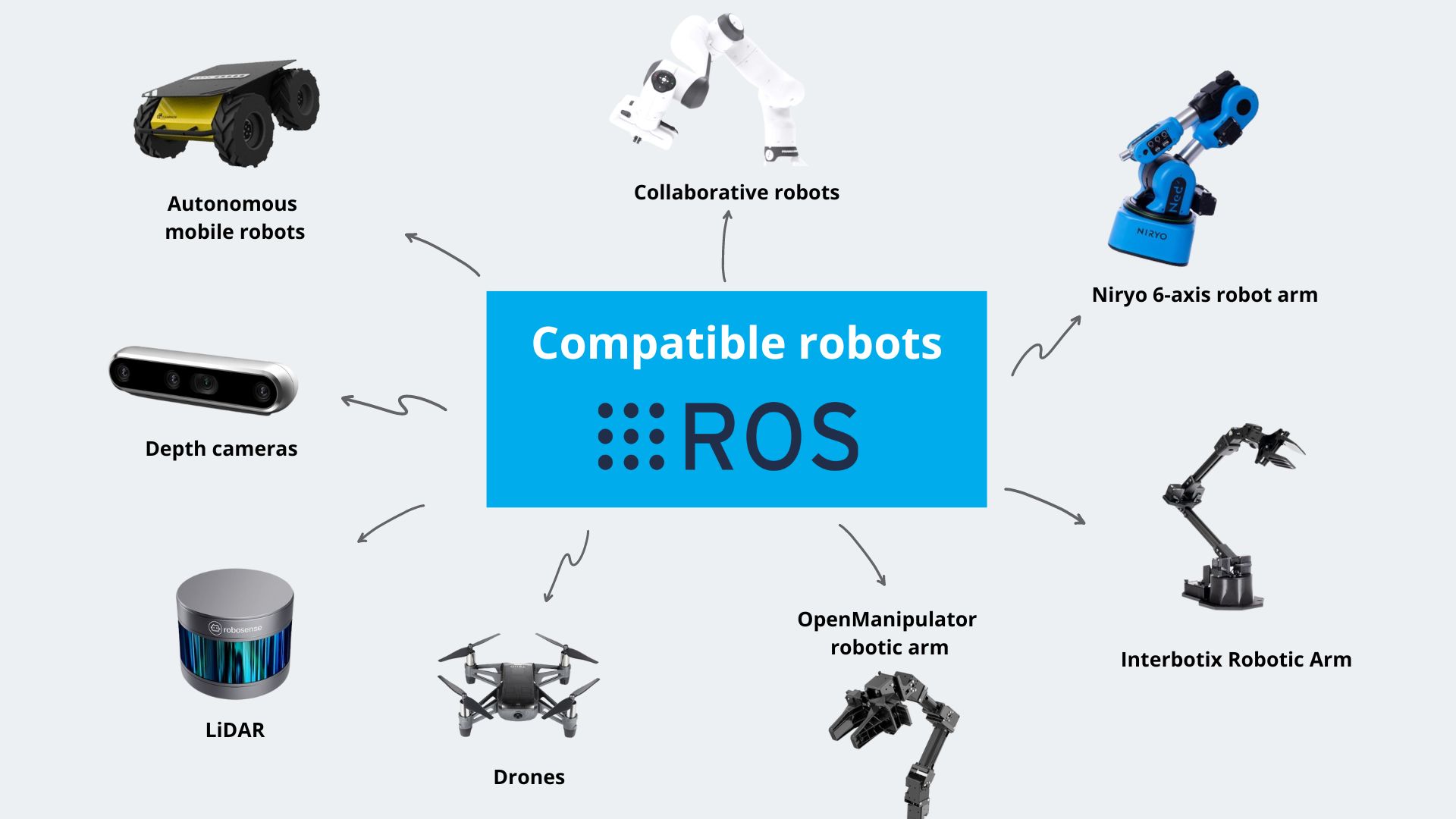
Self-driving vehicle development relies on ROS to integrate LiDAR, cameras, GPS, and perception systems. Industrial robots use ROS for pick-and-place operations, welding, and automated manufacturing. Humanoid robots employ ROS for navigation, manipulation, and grasping.
Although these robots differ dramatically in appearance and application, they all rely on the same underlying communication architecture. Once concepts such as nodes, topics, and the publish–subscribe model are understood, that knowledge transfers naturally across many different robotic systems.

Why Learning ROS Matters
One of ROS’s greatest strengths is how accessible it makes robotics.
A complete simulated robot can be launched in Gazebo without owning any physical hardware. Developers can immediately begin publishing sensor data, subscribing to motor commands, visualizing system behavior, recording data, and building complete robotic applications entirely in simulation.
More importantly, learning ROS is not simply about learning another software framework.
Understanding nodes, topics, services, and the publish–subscribe architecture means understanding the communication model that much of modern robotics is built upon. That architectural knowledge remains valuable regardless of which robot is being used.
ROS is not an operating system, and it is certainly not magic. It is a carefully designed framework that allows independent components of a robot to communicate efficiently while being supported by powerful simulation tools and one of the largest open-source robotics communities in the world.
If you’d like to master ROS 2, robot simulation, and real-world robotics development from the ground up, The Construct’s Robotics Developer Masterclass is designed to take you from beginner to industry-ready through hands-on projects.
More Info & Enroll at: roboticsdeveloper.ai
 2026 Brochure Header - 1")


0 Comments