In this video we are going to see why a user gets a compilation error when trying to compile his ROS Action Server node. This is a video trying to answer the following question posted at the ROS answers forum:...
![[ROS Q&A] 131 – Compilation error in ROS Action Server](https://www.theconstruct.ai/wp-content/uploads/2018/06/Compilation-error-in-ROS-Action-Server.png)
News, Updates, & Resources
In this video we are going to see why a user gets a compilation error when trying to compile his ROS Action Server node. This is a video trying to answer the following question posted at the ROS answers forum:...
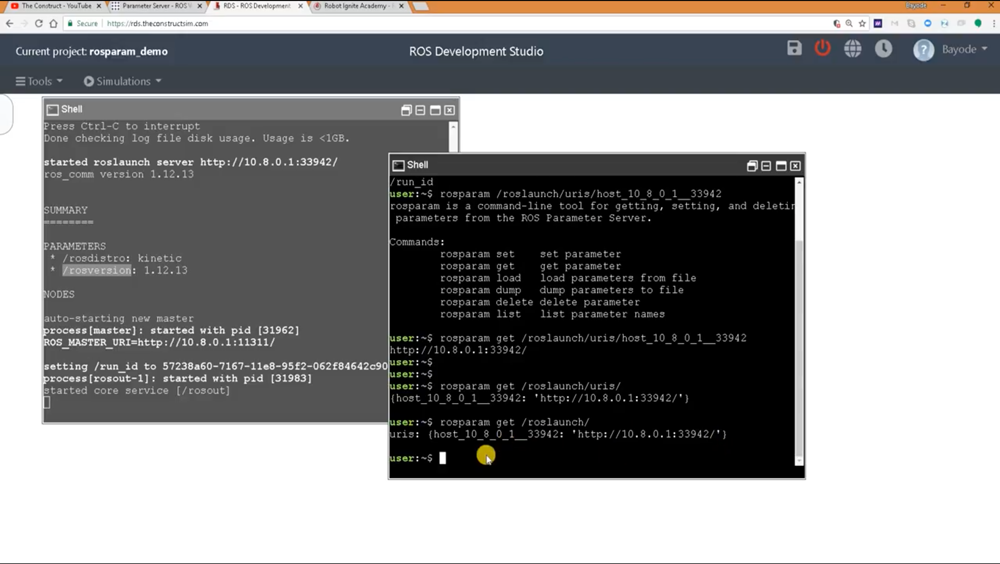
Hello ROS Developers! In this post, we will see what the ROS parameter server is in less than 5 minutes! We'll see what it entails and some of the commands we can use to work with it within the ROS system. Let's go! Step 1: Setup your development environment To follow...
In this episode, HaoChih uses ROS 2 and DDS to create IoT products based on ROS 2 while working at ADLink Technology. He will explain some solutions he has been creating while at ADLink like: * Adlink_DDS bot * Adlink Neuron bot system How they use DDS and ROS 2 for...
In this ROS LIVE-Class we’re going to learn how to create a marker to be displayed in ROS Rviz. Markers are special graphics that we can use in Rviz to display data generated by the robot. For example, we can create a marker that shows a person figure at the...
In this video, we are going to see how can we launch multiple robots in a single Gazebo simulation. We will be introduced to the concept of namespace and tf_prefix, which are essential to make sure that the robots will be able to work correctly. We will create...
Most Popular
For Teachers | 11 MIN READ
For Teachers | 16 MIN READ
For Teachers | 8 MIN READ
For Teachers | 10 MIN READ
Robotics Training
A Full ROS & Robotics Teaching Solution
Develop your robotics team
Intensive ROS trainings
Your opportunity is here. Be a Robotics Pro by 2025
