In this video you will see a very easy example about how to check the distance to an obstacle using a laser:
News, Updates, & Resources
In this video you will see a very easy example about how to check the distance to an obstacle using a laser:
You can synchronize your ROS projects developed in the ROS Development Studio with a git. Sometimes, you must work in cooperation with other developers. Hence you will have to synchronize the work of the whole teamby means of a git. This video will show you how...
Hello Developers, In a quick approach to make a robot move, we can start using some determined points or behaviors. In this post, we are going to test a simple algorithm that makes Turtlebot 2 performs a movement in a straight line, turn right and go straight again....
Last week I was talking to one lead engineer of a Singapore company which is building a benchmarking system for robot solutions. Having seen my presentation at ROSCON2016 about robot benchmarking, he asked me how would I benchmark solutions that are non-ROS...
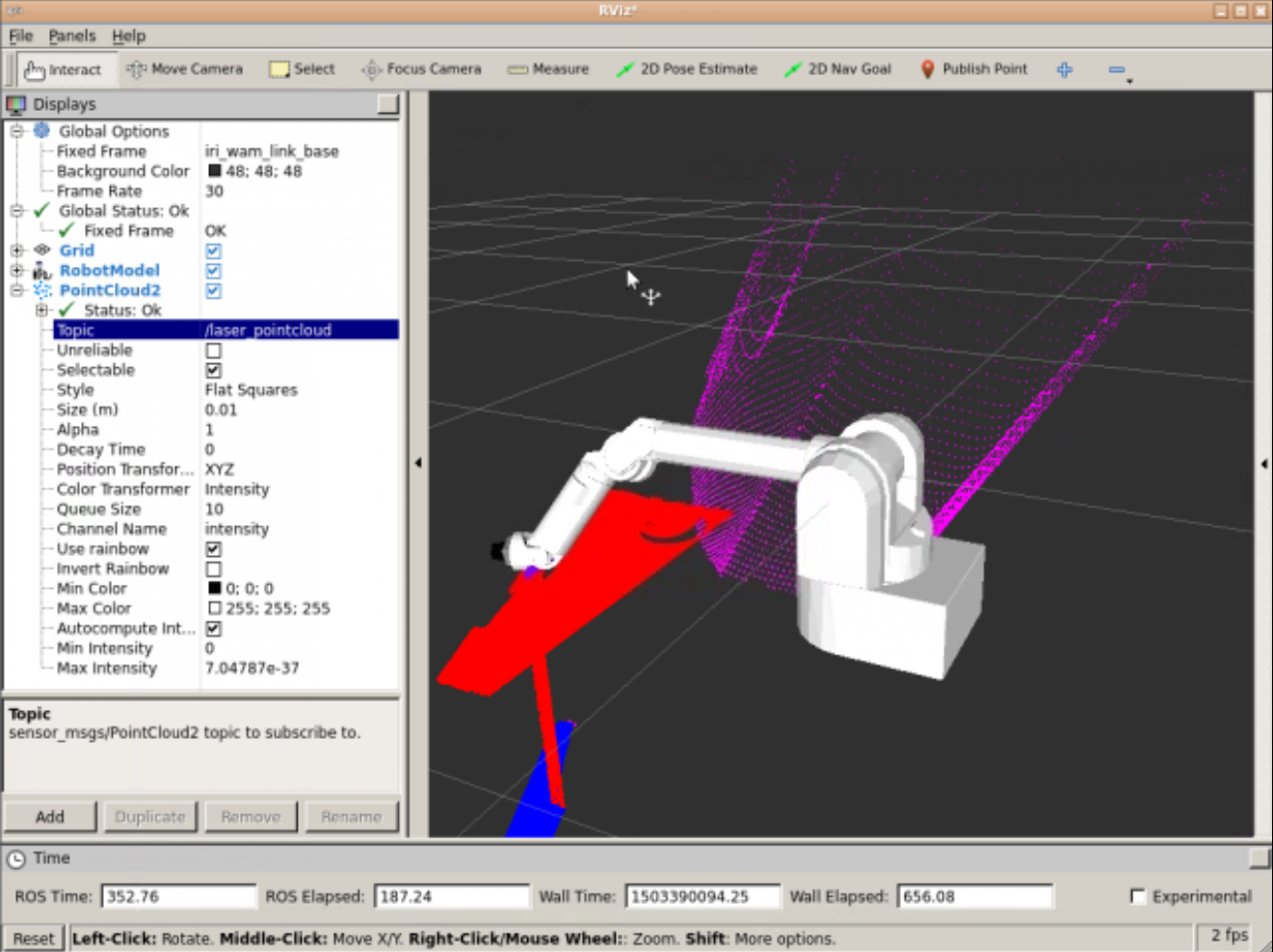
I have been playing around with the laser_assembler ROS package and managed to make it work for assembling several laser scans into a single point cloud, and publish that point cloud on a topic. What I have done is the following: 1- I created a package that...
Most Popular
For Teachers | 11 MIN READ
For Teachers | 16 MIN READ
For Teachers | 8 MIN READ
For Teachers | 10 MIN READ
Robotics Training
A Full ROS & Robotics Teaching Solution
Develop your robotics team
Intensive ROS trainings
Your opportunity is here. Be a Robotics Pro by 2025
