

Today we are going to talk about robots that exist running ROS2 as well as sensors that have ROS2 drivers available.
But before going into that, let me remind you about our ROS online academy. Yes, at the Construct we have created an online academy named The Robot Ignite Academy which contains a ROS learning path for beginners. The path is composed by:
- Linux for Robotics
- Python for Robotics
- ROS Basic Concepts
- Understanding TF
- URDF for modeling robots
- ROS Control
- Build your own robot and ROSify it… and become a ROS Developer!
Some other robotics theory courses included are:
Of course all our courses are based on practice with simulated robots! (theory+practice)
About the robots available
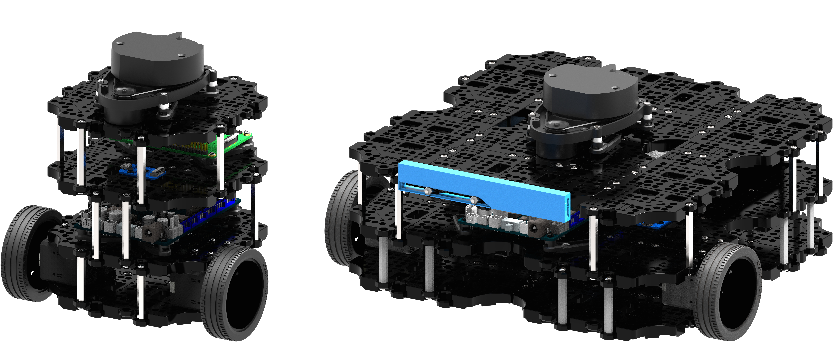
Turtlebot 3, by Robotis
This was the first commercial robot able to run ROS2 on it. Turtlebot3 was designed to run ROS1 by default, so if you buy it, it will come with ROS1 pre-installed. However, the guys from Robotis quickly prepared a tutorial about how to make your Turtlebot3 run ROS2. The full tutorial is here.
ROSbot, by Husarion.
Again, this robot default system is ROS1 but Husarion has released a full tutorial about how to change the default ROS version to ROS2. The full tutorial is here.

Rover Zero, by Rover Robotics
Same procedure as the previous 2. Default system is ROS1 but Rover provides a git repo with the code and instructions about how to install the ROS2 drivers for that robot. Check it out here.

Hadabot, by Hadabot
This is the first ROS2 native robot I have seen. It is a very simple robot with the main purpose of learn ROS2 while applying it to the real robot. Basically, just a pair of wheels with encoders, more than enough for learning basic ROS2. Check it out here.

e-puck 2, by GCTronic.
The e-puck 2 robot is a very small and cool robot with lots of sensors. The e-puck 2, from conception, it has nothing to do with ROS. However, recently Cyberbotics company created a ROS2 driver for that robot so we can now use this excellent robot with our favorite ROS. Here the drivers with tutorials.

Open Manipulator, by Robotis
This is the only arm robot running ROS2 that I’m aware of. It is produced by the creators of the Turtlebot3 and, again, the robot boots initially with ROS1. However, the Robotis team have created a detailed tutorial about how to set this manipulator work with ROS2. Find the tutorial here.

About the sensors avaialble
Laser / LIDAR Sensors
- Velodyne lidars: Drivers here for ROS2 Dashing
- SICK lidars: Check this page for the drivers and the list of supported LIDARS
- EAI YDLIDAR: Drivers here
- Ouster OS-1 3D lidars: Drivers here for ROS2 Foxxy
- Slamtech RPLidar: Drivers here (select the ROS2 branch).
- Hokuyo URG laser: Drivers here.
Cameras
- Generic USB camera: Drivers here
- Raspberry Pi Camera Module: Drivers here
- Astra camera: Drivers (a little bit outdated) here
- Spinnaker camera: Drivers developed inside the Autoware.Auto project. Get them here.
- ZED stereo camera for depth and motion tracking: Drivers for ROS2, Tutorials and examples, ROS2 related documentation
Point Cloud Devices
- Orbbec Astra: Drivers here for ROS2 Dashing
- Intel RealSense D400 series cameras: Drivers here for ROS2 Dashing
- Xsense device: Drivers developed inside the Autoware.Auto project. Get them here.
IMU sensors
GPS
Radars
- Denso Toyota/Lexus radar: Drivers here
Subscribe to the podcast using any of the following methods
- ROS Developers Podcast on iTunes
- ROS Developers Podcast on Stitcher
- ROS Developers Podcast on Spotify
Podcast: Play in new window | Download | Embed
SUBSCRIBE NOW: RSS
 2026 Brochure Header - 1")


0 Comments