This video shows how to properly update the transmission tags in your URDF file in order to work properly with the Gazebo ROS control plugin.

News, Updates, & Resources
This video shows how to properly update the transmission tags in your URDF file in order to work properly with the Gazebo ROS control plugin.
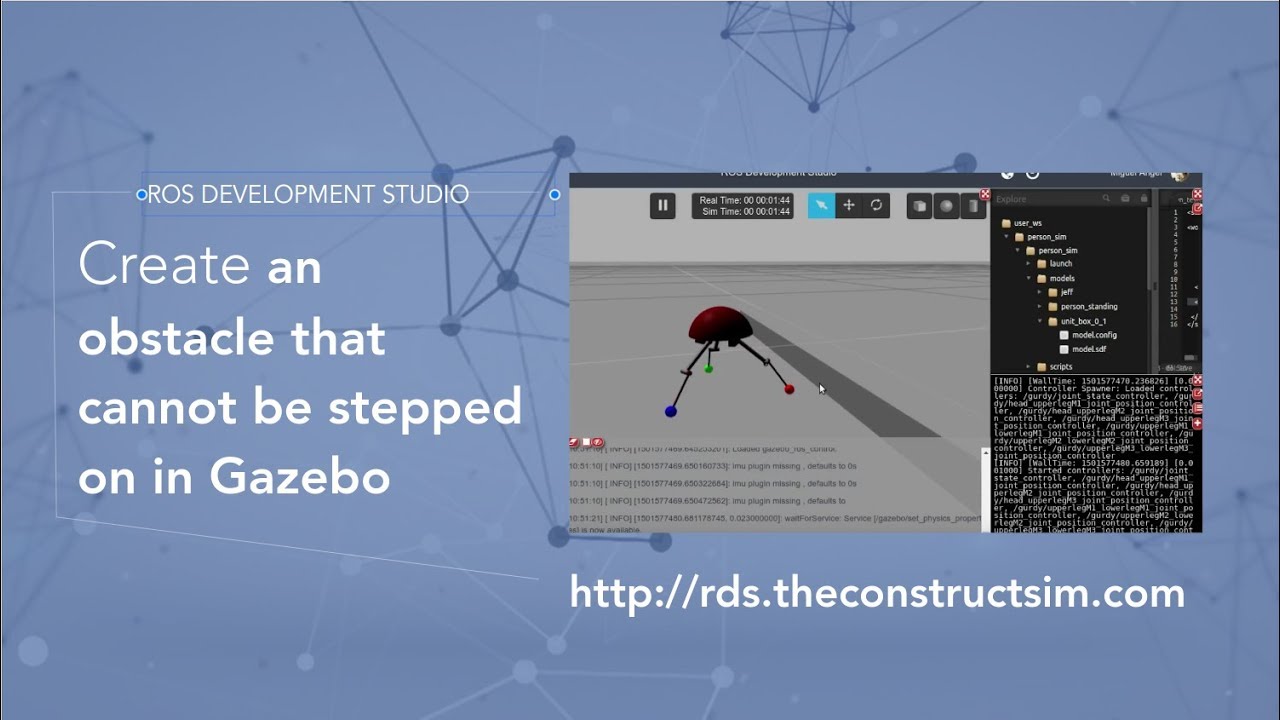
Let's learn how to create an obstacle in Gazebo. Here you have the video response of how to do this test: Here I leave the main things I used to test it and some system information: Information System: Ubuntu 14.04.5 trusty ROS Version: indigo Gazebo 7.4.0 I...

I know this is an old question but I think even now because knowing how to create an hexapod with plugin that moves the robot around and with an SDF model not a URDF might be useful to someone. Check this video answer which explaining a bit the process and the...
Are you having problems to make your robot navigate because of the kind of data you have to treat? It's very common to get stuck when we have to work with quaternions, instead of RPY angles. Quaternions are used in robotics to represent the rotation, in 3 axis, of a...

Are you interested in sharing your robot simulations with other people? Would you like to have them used by many people? Then the best thing you can do is to have it available in RDS! The ROS Development Studio (RDS), is a web and cloud based application where...
Most Popular
For Teachers | 11 MIN READ
For Teachers | 16 MIN READ
For Teachers | 8 MIN READ
For Teachers | 10 MIN READ
Robotics Training
A Full ROS & Robotics Teaching Solution
Develop your robotics team
Intensive ROS trainings
Your opportunity is here. Be a Robotics Pro by 2025
