

This tutorial is created by RA 015 Frederick
Rosbotics Ambassador Program https://www.theconstruct.ai/rosbotics-ambassador/)
Was wir lernen werden:
- Wie erstellt man ein ROS2 Launch File in einem ROS2 Paket
- Welche Anpassungen man machen muss
- Wie man Nodes in das Launch File hinzufügt
- Wie man das Aufnehmen eines ROS-Bags in einem Launch-File hinzufügt
- Welche Vorteile es hat, ein Launch File in Python zu schreiben
Verwendete Ressourcen:
- Verwende dieses rosject oder ein eigenes ROS2 Python Paket https://app.theconstructsim.com/l/5e5aaf01/
- The Construct: The Construct: Where Your Robotics Career Happens (theconstructsim.com)
- ROS2 Kurse bei The Construct:
Überblick:
Mehrere Nodes können gleichzeitig über ein gemeinsames Launch-File gestartet werden. Durch die Verwendung von Python für diesen Start können einfach komplexe Algorithmen implementiert werden.
Öffne das Rosject
Über RUN kann das rosject gestartet werden.

Als nächstes erstellen wir den Ordner „launch“ in dem Package „start“, in welchem wir unsere Launch Files speichern werden.
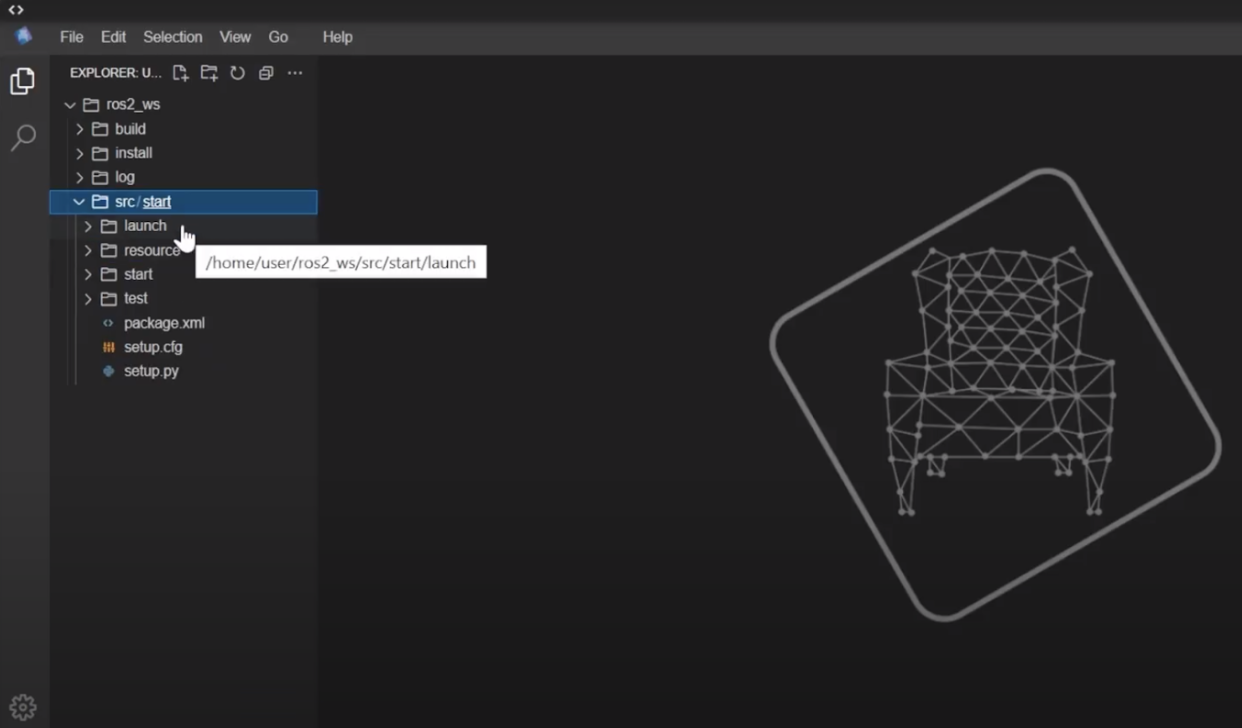
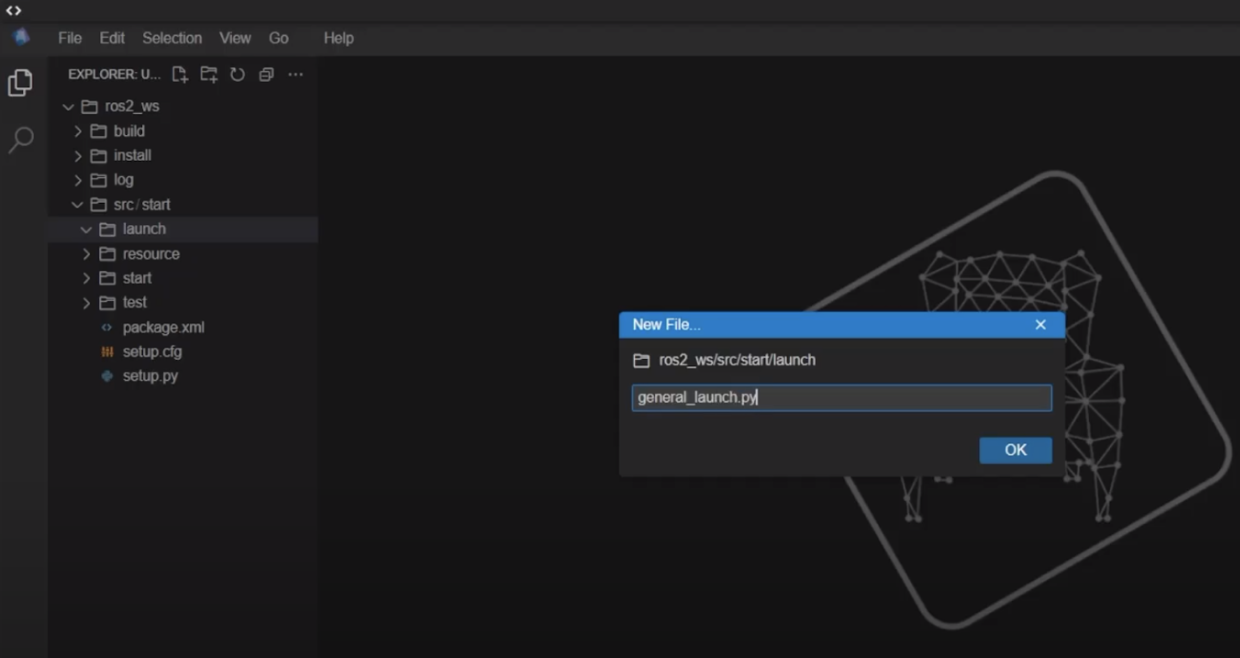
In diesem erstellen wir das Launch File „general_launch.py“.
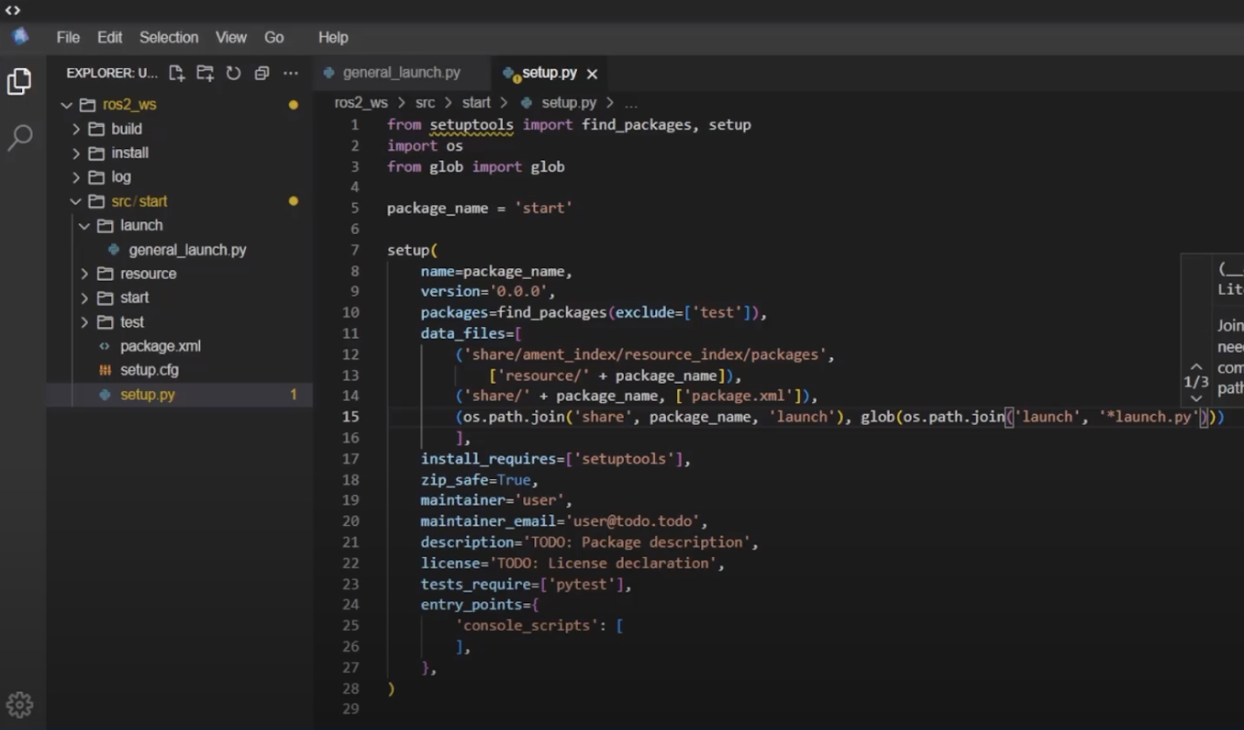
Anschließend passen wir die setup.py an, damit das Launch File gestartet werden kann.
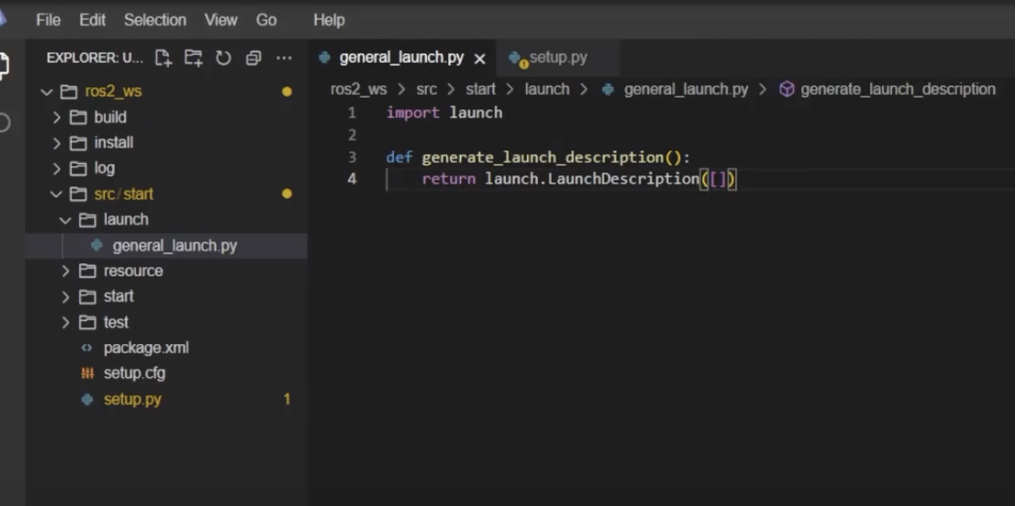
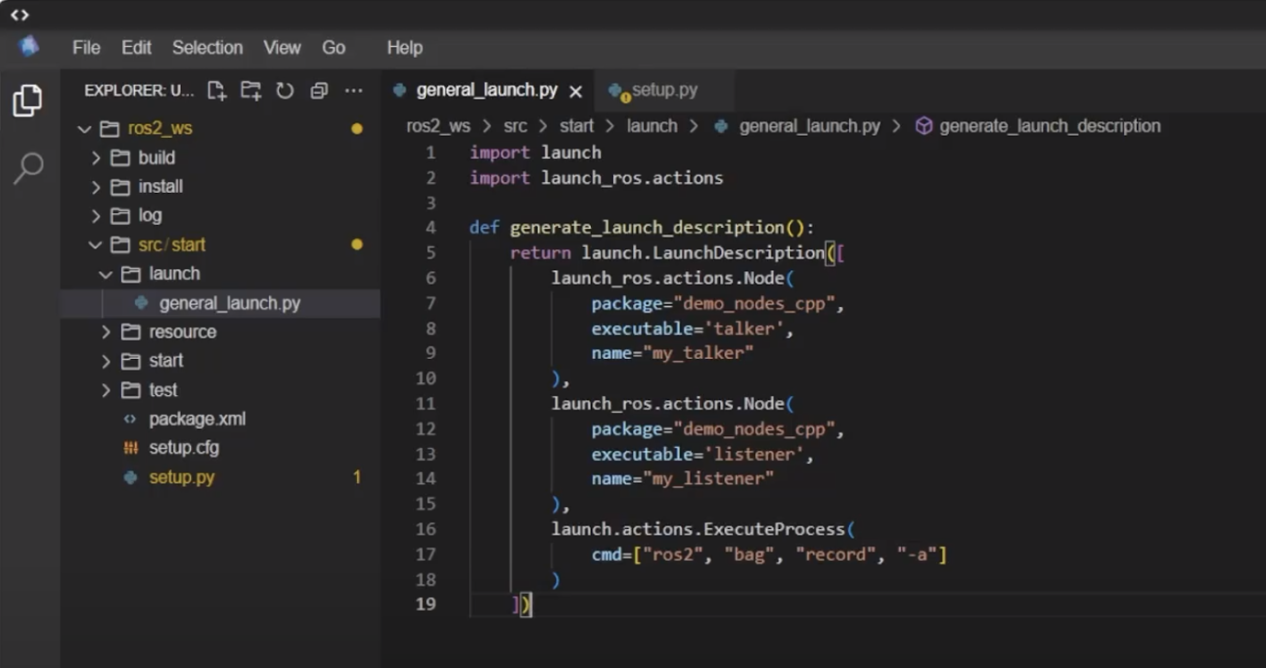
Als nächsten programmieren wir das eigentliche Launch File. In diesem wird die Funktion „generate_launch_description()“ verwendet, deshalb definieren wird diese und geben für einen ersten Test erstmal eine leere Liste zurück.
Anschließend starten wir das Launch File, indem wir erst in den Workspace gehen, dann den Bauprozess durchlaufen und danach mit „ros2 launch start general_launch.py“ das Ganze starten. Tipp: durch die Verwendung von TAB kann man sich viel Tipparbeit und Zeit sparen.
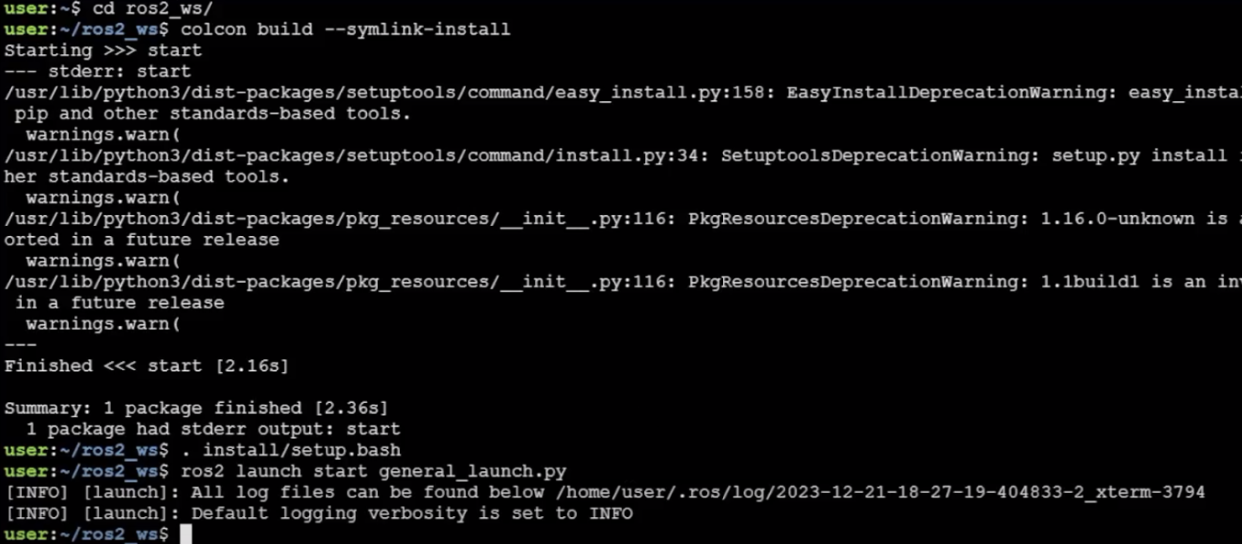
Das sollte erfolgreich keine Nodes starten, da unsere Launch Description aktuell leer ist.
Um dies zu ändern, füllen wir die Launch Description mit zwei Nodes und nehmen einen Prozess zum ROS-Bag aufnehmen auf.
Nun können wir das ganze erneut bauen und starten. Wir erhalten:
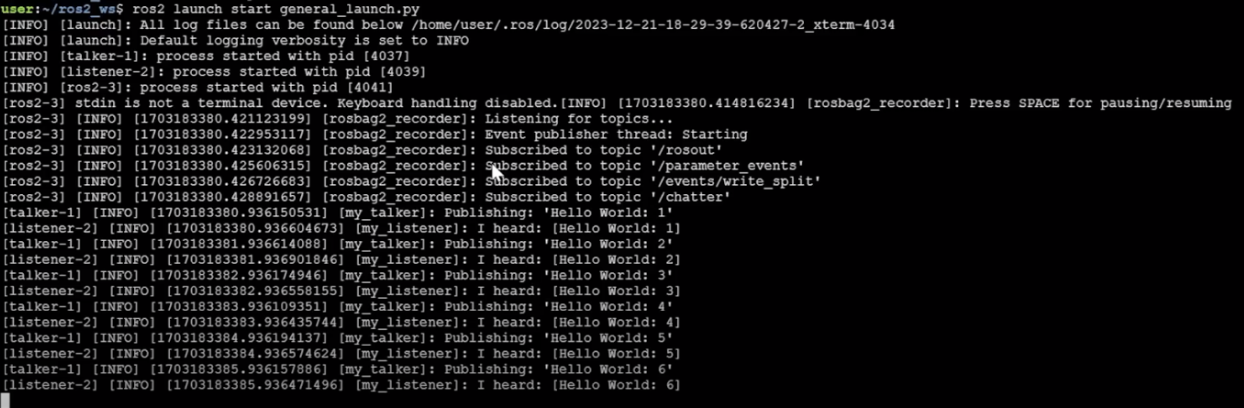
Wir haben nun mit einem ROS2 Launch File mehrere Nodes und Prozesse gestartet.
Dies kann nun beliebig erweitert werden.
Wir hoffen, dass dieser Post helfen konnte und Dir gefallen hat.
Video Tutorial
 2026 Brochure Header - 1")




0 Comments