ROS-based Robot
Turtlebot
Works with
ROS 1
ROS 2

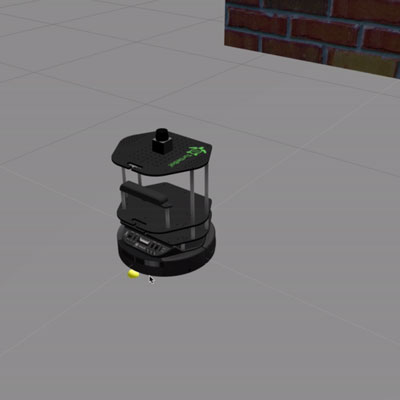
About TurtleBot

TurtleBot was created at Willow Garage by Melonee Wise and Tully Foote in November 2010. With TurtleBot, you’ll be able to build a robot that can drive around your house, see in 3D, and have enough horsepower to create exciting applications.
For more information, we recommend an interview with TurtleBot creators, Tully Foote and Melonee Wise. TurtleBot Inventors Tell Us Everything About the Robot (IEEE Spectrum, By Evan Ackerman, 26 Mar 2013)
(source: TurtleBot)
Related courses
ROS2 Basics for C++ in 5 days Foxy
Learn ROS2 basics now. It doesn’t matter if you are new to ROS or a veteran, ROS2 is here to stay.
ROS2 Basics for Python in 5 Days Foxy
Learn ROS2 basics now. It doesn’t matter if you are new to ROS or a veteran, ROS2 is here to stay.
Basic Kinematics of Mobile Robots
Learn the basic kinematics of mobile robots.
Kalman Filters
Learn how Kalman filters work and how to apply them to mobile robots using ROS.
Basic Maths for Robotics
Learn the most useful Mathematics: the ones we can apply to Robotics!

Path Planning Basics
Learn the theory behind the most used path planning algorithms.
ROS Basics in 5 Days (Python) Noetic
Learn the fundamentals of ROS to understand and be able to program robots.
ROS Basics in 5 Days (C++) Noetic
Learn the fundamentals of ROS to understand and be able to program robots.
Python 3 for Robotics Noetic
Master the basics of Python 3 for robot programming.
TF ROS 101
To finally understand TF and Robot State Publisher in ROS
FlexBe with ROS
Learn the basics of how to use FlexBe with ROS.
ROS Navigation in 5 Days - Noetic
Learn how to make your robot navigate autonomously by using the ROS Navigation Stack.

ROS2 Navigation
Navigation is one of the key abilities for a robot to have. In this course you will learn how robots navigate in ROS2.

Fuse Sensor Data to Improve Localization
Learn how to fuse GPS, IMU, odometry and other sources of localization.
RTAB-Map in ROS 101
Learn how to use the rtabmap_ros package for performing RGB-D SLAM
ROS Perception in 5 Days - Noetic
Learn OpenCV, FaceRecognition, Person tracking and object recognition in ROS1Noetic system
Machine Learning for Robotics
Learn about machine learning concepts applicable to robotics; and understand the fundamental principles of artificial intelligence.
Reinforcement Learning for Robotics
Learn the main reinforcement learning techniques and algorithms.
Unit Testing with ROS
Learn how to perform Unit Tests with ROS on the 3 main levels of testing: Python tests, ROS tests and Integration tests.

Debug Cases
This Course contains several ROS-related problems that need to be solved by you.
Related resources
Infographic - A brief history of TurtleBot

Tutorial - How to Navigate Autonomously with TurtleBot
Tutorial - How to make TurtleBot rotate left and right?
Tutorial - How to add a rotating join to Kinect in Turtlebot
Tutorial - Use OpenAI_ROS with TurtleBot2 Step by Step
Tutorial - How to navigate while avoiding obstacles