Online Course
ROS 2 Perception in 5 Days
Elevate Your ROS 2 Expertise with Sensor Intelligence

Course overview
This course will embark on an exciting journey into the realm of perception in robotics using ROS 2. Through a series of structured units and hands-on projects, you will explore various aspects of sensor data processing and perception techniques.
What You Will Learn
Sensor Data Handling
Process Laser Scans, Images, and Point Clouds
Image Processing
Implement Blob Tracking and Line Following with OpenCV
Human-Robot Interaction
Learn Face Detection, Recognition, and Human Tracking
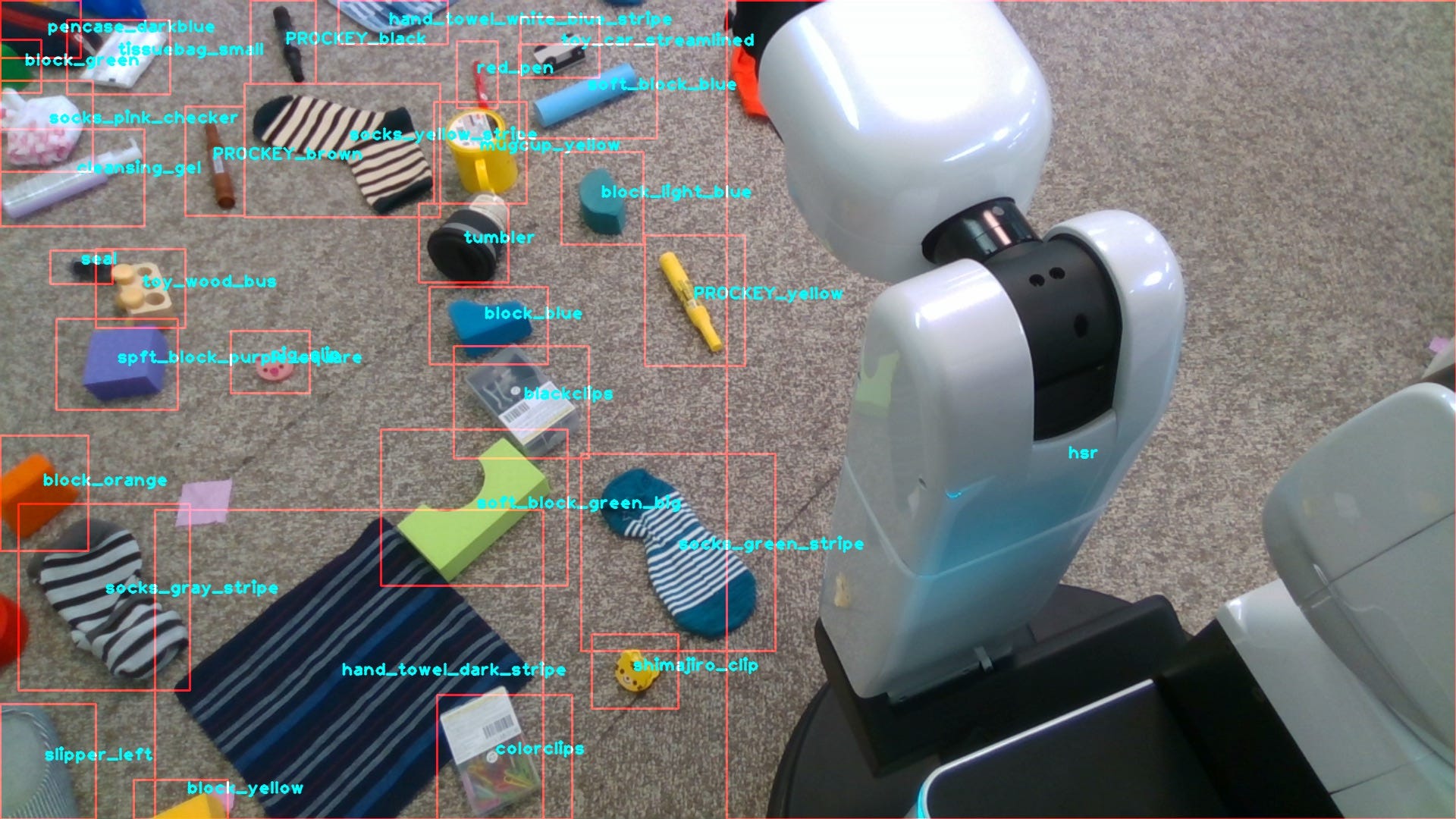
AI Perception
Apply YOLO for Object Detection, Pose Estimation, and Segmentation
Deep Learning
Integrate Advanced AI Techniques
100% Online
Intermediate Level
Approx. 48 hours to complete
Prerequisites
Simulated Robots Used
deepmind_bot

Course Final Hands-on Project
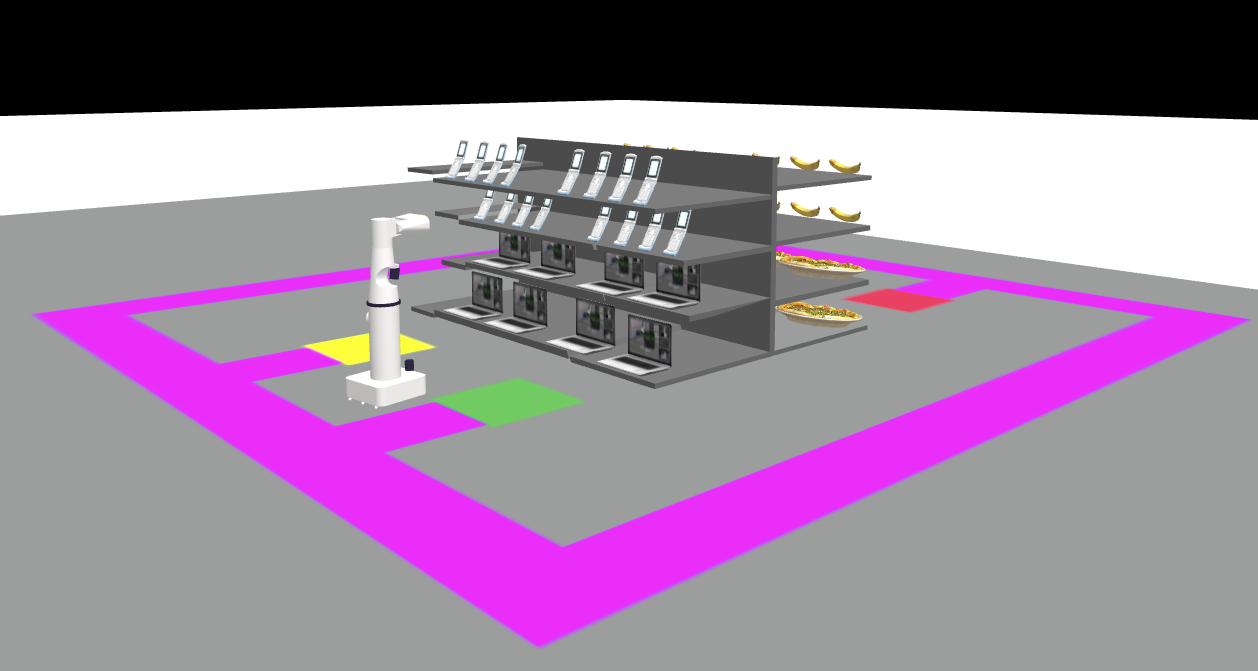
In the Final Project, you will apply the knowledge and skills acquired throughout the course to address a real-world problem: Intelligent Inventory Management with ROS 2.

Syllabus
Unit 1: Course Intro
In this unit, you will glimpse what this course ‘ROS 2 Perception in 5 Days’ course is all about.
Unit 2: Working With Sensor Data in ROS 2
In this unit, you will understand the different sensor data types used in ROS 2.
Unit 3: Image Processing
In this unit, you will gain a comprehensive understanding of image processing in ROS 2, focusing on integrating OpenCV to implement essential techniques like blob tracking and line following in robotic perception tasks.

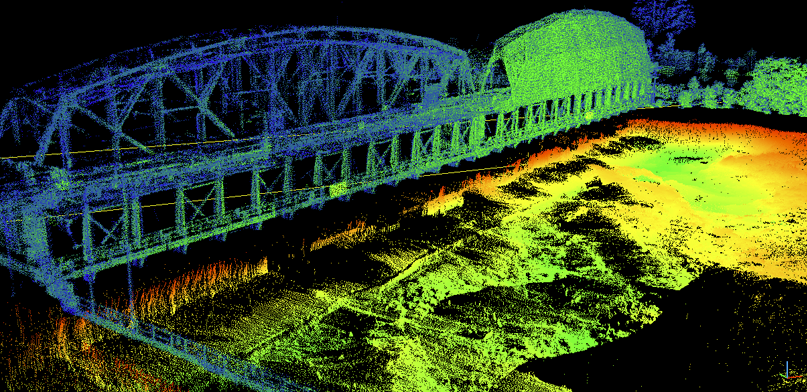
Unit 4: Point Cloud Processing
In this unit, you will grasp point cloud processing within ROS 2, covering two primary workflows: surface and object detection. The focus lies on incorporating the PCL library to implement crucial techniques such as filtering, segmentation, and clustering for robotic perception tasks.
Unit 5: Human-Robot Interaction
In this unit, you will learn how to implement perception techniques to enhance Human-Robot Interaction (HRI), starting with face detection and then progressing to face recognition and human tracking.
Final Project: Intelligent Inventory Management with ROS 2
In the final project, you will use the knowledge and skills acquired throughout the course to tackle a real-world problem: Intelligent Inventory Management with ROS 2.
What our students think
“I have had a great experience with The Construct. I believe much of what I have learned thus far regarding ROS has been from these courses and the concepts behind the implementation of ROS have been helpful even outside of ROS applications.“
“I’m very happy about working with The Constructsim, it is affordable, it is very comfortable for me, and the tools in the GUI are very useful“
“I really liked the learning approach based on projects and practical examples and I found the final project with an actual robot to be very useful and challenging.“
Course creator

Jason Koubi
Robotics Software Engineer | ROS Developer
Related courses
Python 3 for Robotics
Master the basics of Python 3 for robot programming
OpenCV Basics for Robotics
Learn how to work with OpenCV in ROS.
ROS 2 Basics in 5 Days
Learn ROS 2 basics now. It doesn’t matter if you are new to ROS or a veteran, ROS 2 is here to stay.
Discover more Robotics Courses

Start Learning Now.
RESULTS GUARANTEED