Trash Tables Picker
Use a mobile robot to pick up the tables that have the trash
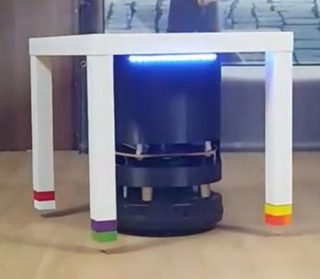
The final goal of the project is to set up an automatic system that allows for a robot, called Cleaner, to find and pick up a trash table in our cafeteria and take it to a back room, where it will be emptied.
For this you will have to complete one of the following tasks:
- Set up Nav2 in the robot
- Create a detection system for the trash tables. Because of the nature of the robot, you cannot use intensity Lidar values. The only sensor available is Lidar ranges.
- Create an approach system that leads the robot underneath the table and picks it up.
- Create a drop off system that drops the trash table in the next room.
- Create a web application in order to command the robot to go pick up the trash table when it is full.
- Containerize all applications using Docker.
- Write documentation about your project.
Must work in simulation
Must work in real robot
Students
For students that
Want to show the feasibility of a theoretical concept
Want to work as a full skills Robotics Developer
Level of complexity: medium
Amount of time: 100 hours
Skills
Main Skills Practised
Navigation based on perception
Robot Navigation
Path Planning Algorithms
Perception algorithms
Let’s Learn Together!
Become a Robotics Developer in only 6 months
www.roboticsdeveloper.ai