How to manage fleets of robots with open source software
Delivered by:
In cooperation with:


Overview
Let’s learn the basics of fleet management
This hands-on training is a practical intro to using ROS2 to manage multi-robot systems using Open-RMF. We will learn how to use this open-source framework, and get hands-on experience using a small fleet of real robots.
What we will learn
- What is a fleet management system and when you need one
- How to manage fleets of robots using the Open Robotics Middleware Framework (Open-RMF)
- Have an overview of Open-RMF and what is capable of doing
- Define the working environment for the robots
- Connect your fleet of robots with Open-RMF

How we’ll proceed
- We will complete exercises with simulated robots, along with the instructors
- We will make a full project with an environment of real robots (BotBox)
Who is this tutorial for?
- For people who want to understand what a fleet management system provides
- Researchers in fleets of robots management
- Engineers or CTOs who want to build scalable robotics products, faster

100% PRACTICAL
Practice A Lot with Simulated & Real Robots
You will learn concepts in simulation before practicing on real robots.

SIMULATED ROBOT CAFETERIA
StartBots Coffee

SIMULATED ROBOT CAFETERIA
StartBots Coffee
We will bring a real warehouse environment with 3 robots for you to practice serving requests

REAL ROBOT WAREHOUSE
BotBox warehouse

REAL ROBOT WAREHOUSE
BotBox Warehouse
What will you learn from the curriculum?
Part 2
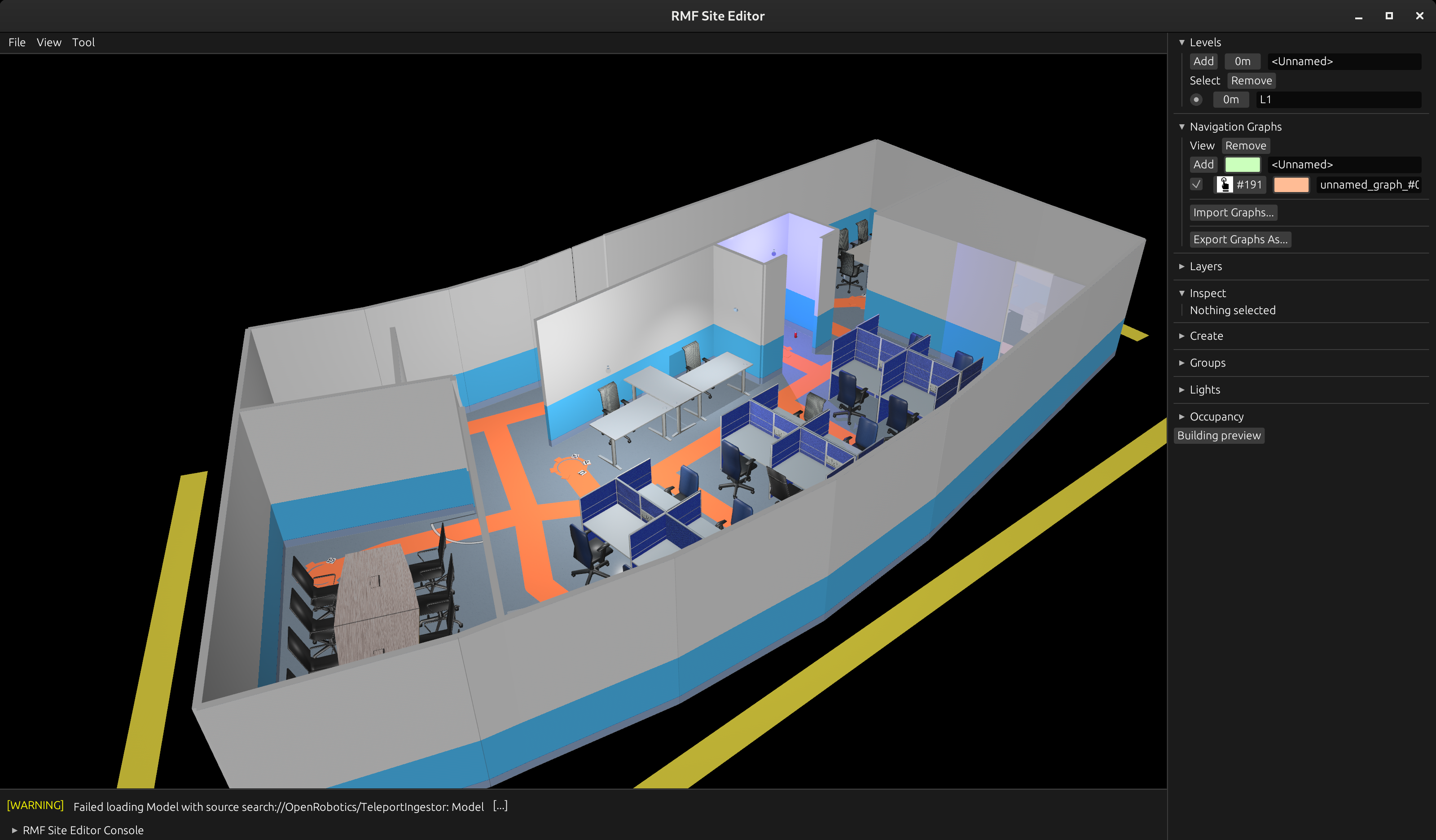 Creation of environment with RMF traffic-editor and manually
Creation of environment with RMF traffic-editor and manually
- Learn how to create an RMF map config file using an image map
- Learn how to create a simulated environment based on the RMF map config file
- Learn how to adapt existing simulated environments for RMF use
{kind=link}
{kind=link}
Requirements
- Basic knowledge of Linux and Python
- Basic knowledge of ROS 2
- A laptop (Windows, Linux or Mac) with Chrome or Firefox
- No need to install anything in your laptop!!!
The Instructors
We think you are going to be pleasantly surprised by the amount of support you have during the training.
Miguel Angel Rodriguez
Course Development Manager @ The Construct | Creator of the only course in the world that systematically teaches how to manage fleets with Open-RMF

Ricardo Téllez
CEO @ The Construct | Former teacher of Robotics at La Salle University and Universitat Politècnica de Catalunya

Michael Grey
Development Leader @ Intrinsic | Open RMF project leader. The man behind the development of Open-RMF
FAQ
Frequently Asked
+ What are the pre-requirements for this training?
Prerequisites Knowledge:
To prepare for this onsite training, you need to know the basics of Linux, Python, and ROS2 Basics. This is mandatory, so in case you need it, take the following three courses:
- Linux for robotics (Free)
- Python3 for robotics (Free)
- ROS2 Basics in 5 Days (Python) (Not free)
Equipment:
- A laptop (you can use Windows, Linux, or macOS)
- Google Chrome or Firefox browser.
- It is not necessary to have Linux on your computer. Any operating system is valid.
+ What is the language used in the training?
English
+ What is the programming language used for the course?
Python in Linux
+ Do I need to install ROS in advance?
No. You only need to bring your laptop and connect to the internet. You can use Windows, Linux, or macOS.