ROS-based Robot
Husky
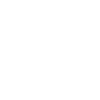
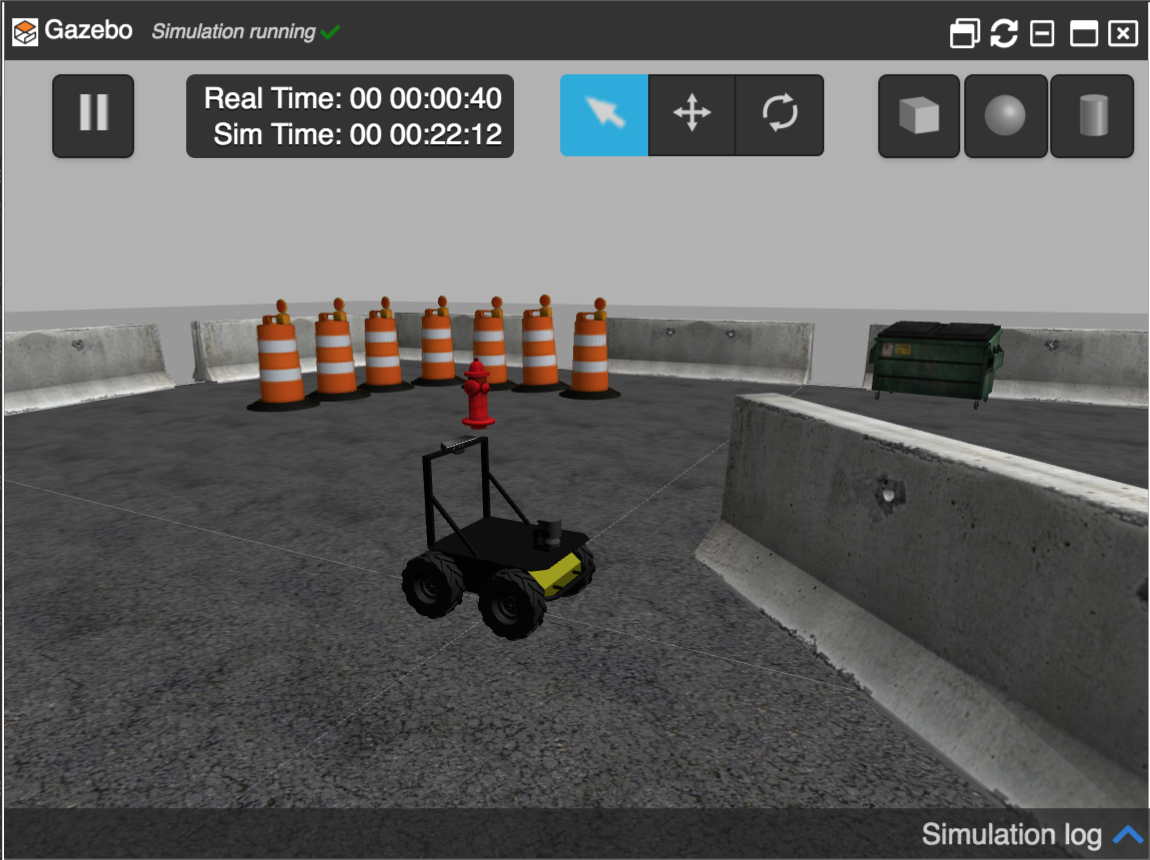
With the Husky robot simulation, you can learn how to program the robot without the risk of damaging the real thing. You can use it to test your robot navigation algorithms, build a map, do path planning, and navigate it autonomously in a simulated indoor/outdoor environment.
Works with
ROS 1

About TurtleBot 3

Husky is a medium-sized robotic development platform. Its large payload capacity and power systems accommodate an extensive variety of payloads, customized to meet research needs. Stereo cameras, LIDAR, GPS, IMUs, manipulators, and more can be added to the UGV by our integration experts. The Husky’s rugged construction and high-torque drivetrain can take your research where no other robot can go.
Husky fully supports ROS—all of the packages are available in the Husky github org.
(source: Clearpath Robotics)
Common ROS packages for the Clearpath Husky, useable for both simulation and real robot operation.
- husky_control : Control configuration
- husky_description : Robot description (URDF)
- husky_msgs : Message definitions
- husky_navigation : Navigation configurations and demos
- husky_ur5_moveit_config : MoveIt configuration and demos
For Husky instructions and tutorials, please see Robots/Husky.
To create a custom Husky description or simulation, please fork husky_customization.

Related courses
ROS Navigation in 5 Days
Learn how to make your robot navigate autonomously by using the ROS Navigation Stack.
TEB Local Planner
Learn how to set up the TEB Local Planner for your Navigation system, including set up for car-like robots.

Fuse Sensor Data to Improve Localization
Learn how to fuse GPS, IMU, odometry, and other sources of localization.
Related resources
Tutorial - How to Use Gazebo's spawn_model
- How to use spawn_model in a launch file
- How spawn_model behaves differently than other nodes included in launch files
Tutorial - How to Move a Robot to a Certain Point Using Twist
In the ROS Q&A Tutorial, we will show you how to move to a certain point in space using Twist /cmd_vel.
Tutorial - Basic usage of octomap_mapping package
LIVE Class – How to use GPS to do autonomous robot navigation?
The robot used: simulated Husky
What you will learn:
- How to record a trajectory that you would like the robot to do
- How to make the robot reproduce that trajectory