Return shelf to location
Reset warehouse lab shelf to its initial position
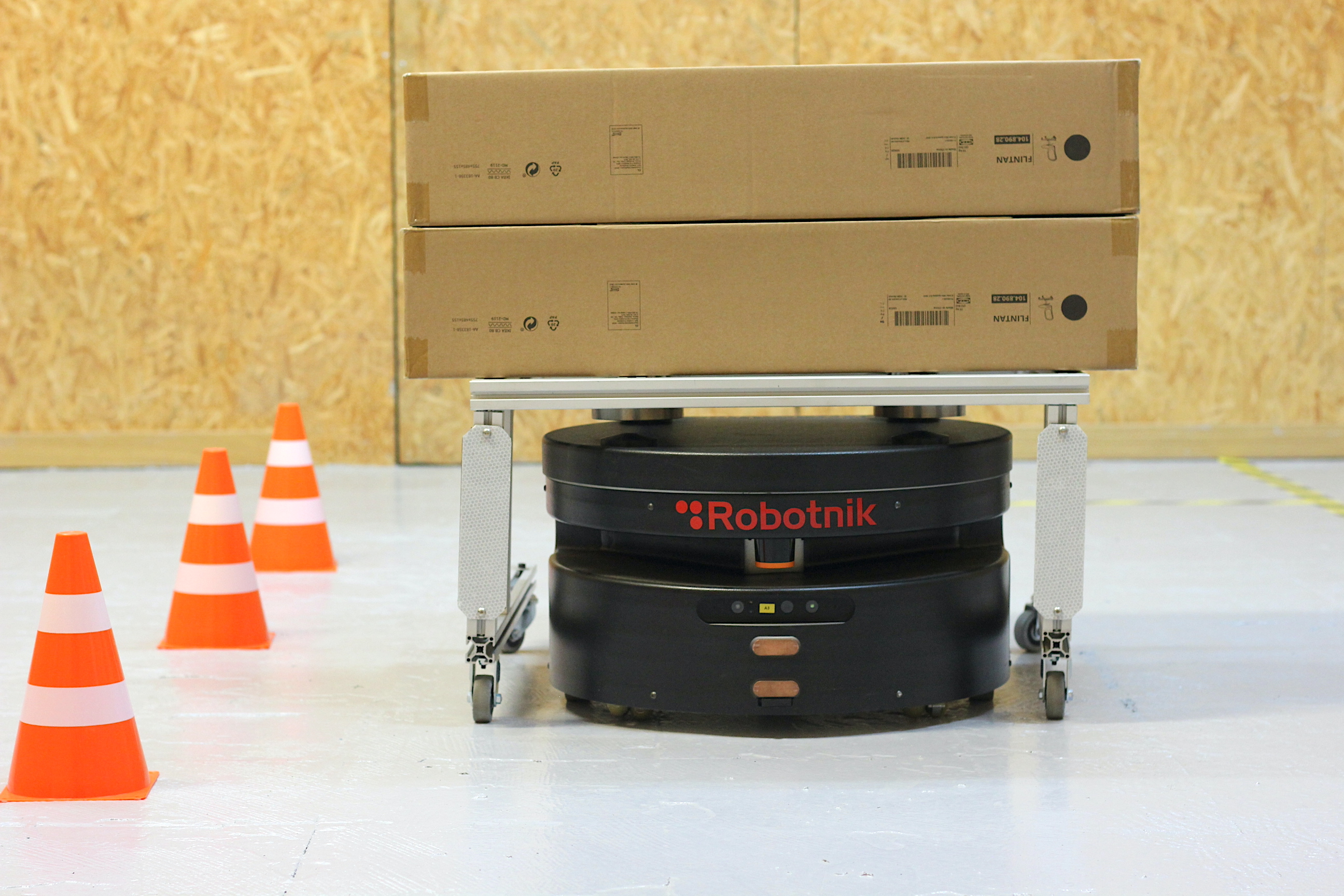
The final goal of the project is to set up an automatic system that allows the RB-1 robot to detect where the shelf is in the warehouse and bring it to its initial location. This is a complex task because the shelf can be anywhere and the robot has to find it and approach to it properly.
For this, you will have to complete each of the following tasks:
- Set up Nav2 in order to allow RB-1 to perform autonomous navigation
- Create an automated system that allows the RB-1 robot to detect the shelf, no matter where it is in the warehouse
- Add the docking to the shelf behavior
- Move the shelf to the proper location
- Add a behavior tree that controls the whole process
- Create a web application in order to control and monitor the whole process
- Containerize all the applications using Docker
- Write documentation about your project
Must work in simulation
Must work in real robot
Students
For students that
Want to apply the interaction between ROS and Web technologies
Want to work as creators of interfaces for robots and Human Robot Interaction
Level of complexity: medium
Amount of time: 100 hours
Skills
Main Skills Practised
Robot perception
Robot navigation
Robot behavior design
Let’s Learn Together!
Become a Robotics Developer in only 6 months
www.roboticsdeveloper.ai