Hands-on Training
Mastering Mobile Manipulators
Learn how to create ROS1 applications for autonomous mobile manipulators
*Need to learn this topic in ROS2? Check here.
This training is full, please check our next training here.
This training is organized by

Trusted by

Master Robot Programming with Our
In-Person Training
Based on ROS1
Learn how to build mobile robot manipulator applications with ROS1 from the ground up with our hands-on training. Our expert instructors will guide you through everything you need to know, including:
- Robot Navigation
- Robot Perception: Object Detection
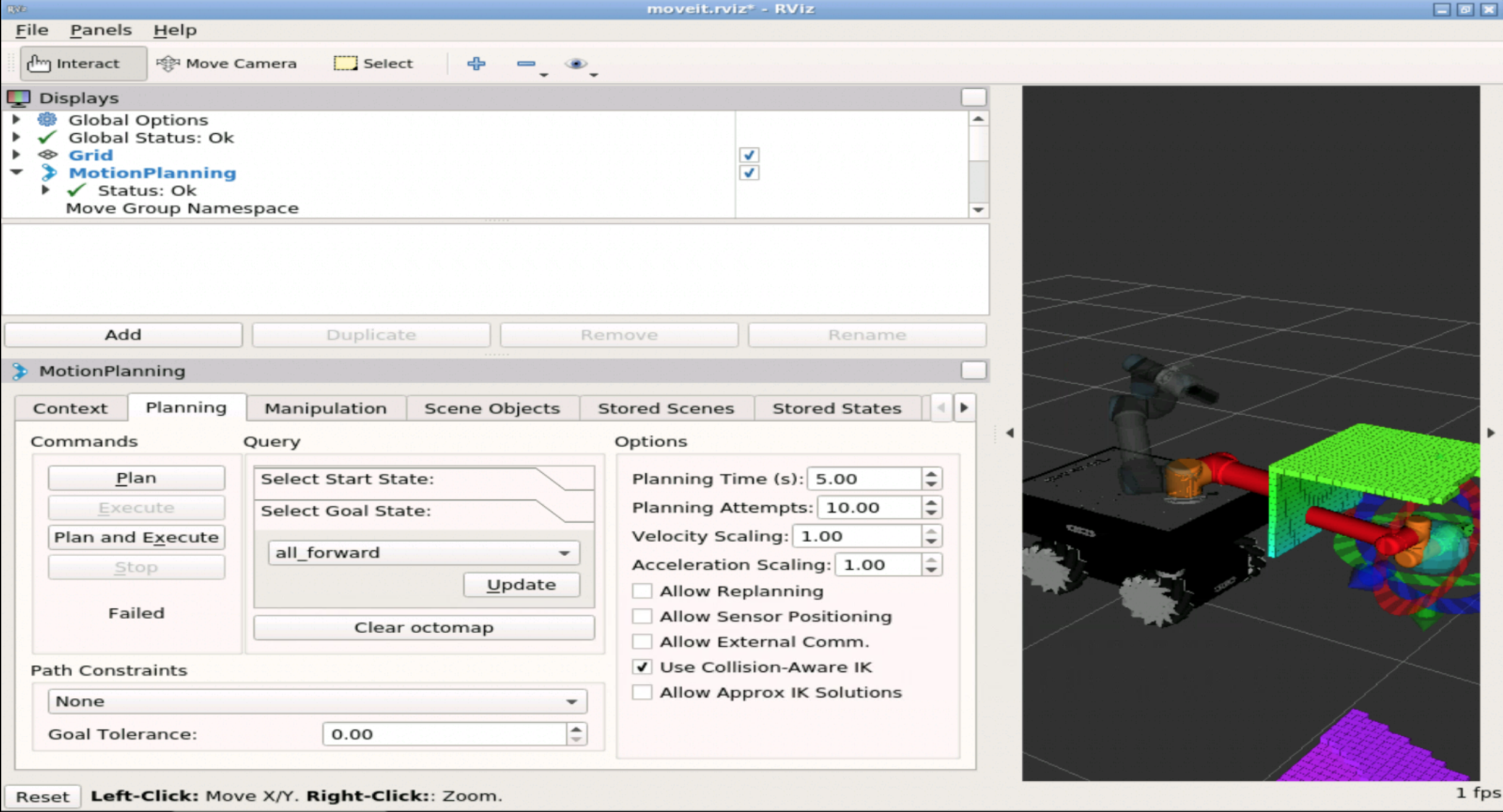
- Motion Planning for Robotic Manipulators
- Pick & Place Objects with MoveIt
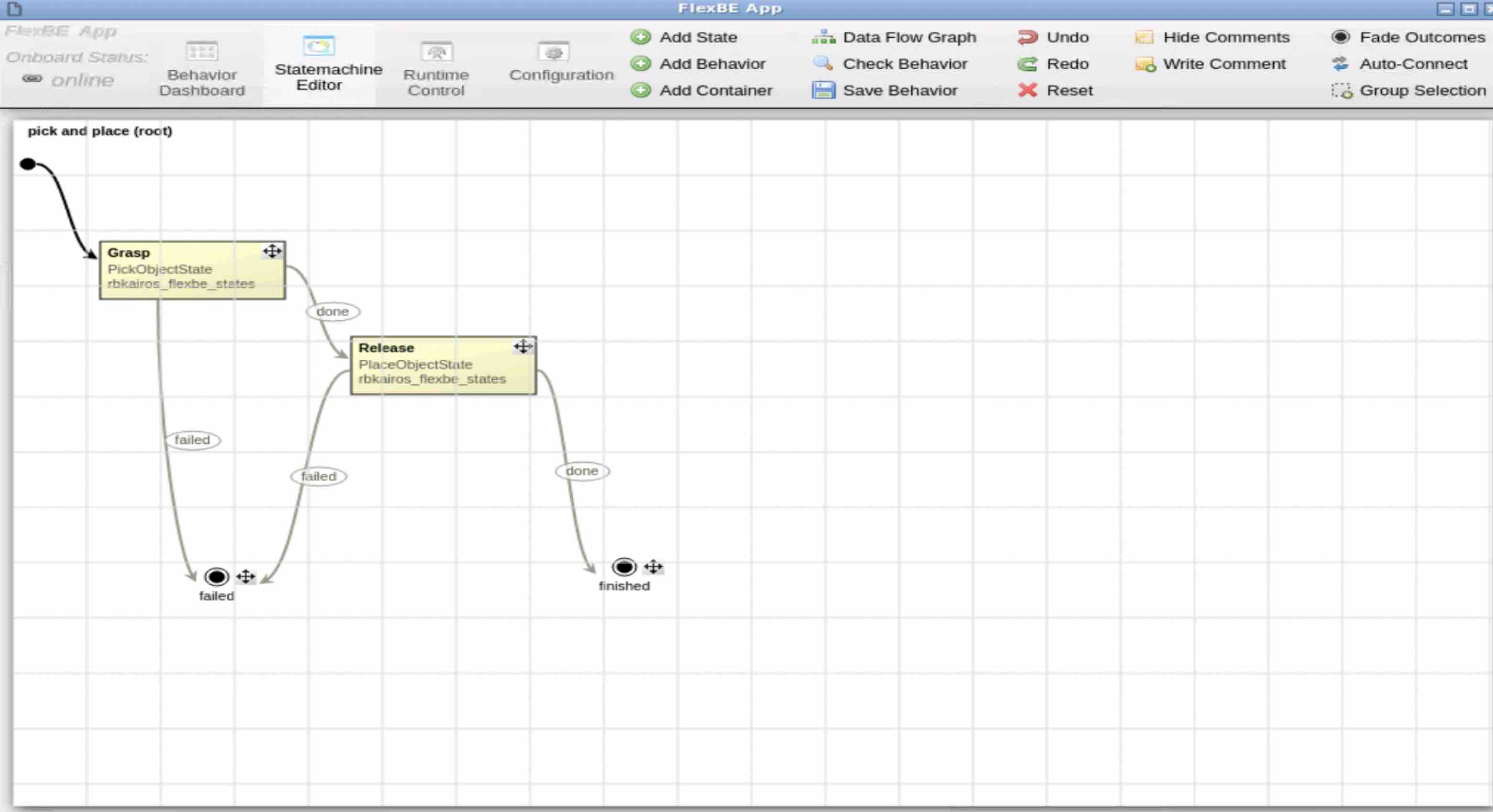
- Robot Behavior Design using FlexBe
- Creating a Complete App that Integrates all Behaviors into a Single ROS App
- Creating a Web Interface for End Users to Use
Our program is held in-person, so you will have the opportunity to work with real robots in a collaborative and immersive environment. Join us today and learn how to turn your concepts into reality.
In-person instruction from industry professionals
Hands-on experience with real robots
Exercises with simulated robots, working along with the instructors
Complete a real-world project with a real RB-KAIROS+ mobile manipulator
Access to a supportive community of like-minded learners
100% PRACTICAL
Practice with Simulated & Real Robots
You will learn each concept in simulation before practicing on real robots

SIMULATED ROBOT USED
RB-KAIROS+

SIMULATED
Room + Pick&Place Table
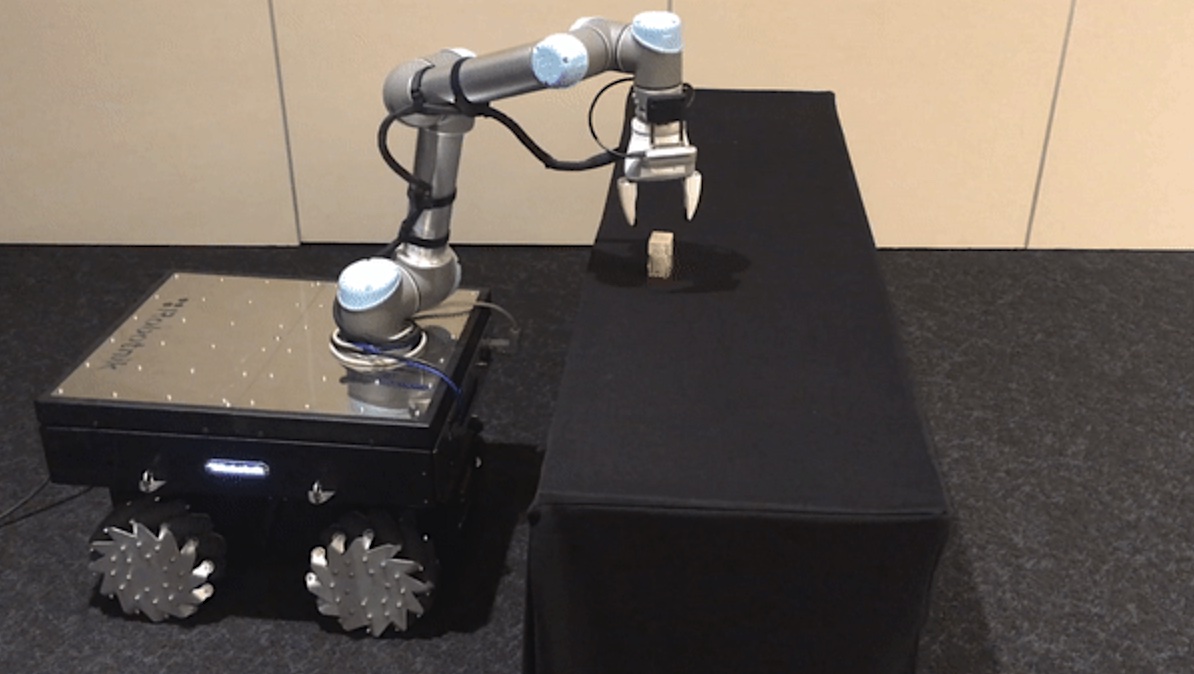
You will use the real RB-KAIROS+ mobile manipulator from Robotnik, equipped with a UR arm and a GR Gripper, as well as an additional point cloud camera on the wrist


REAL ROBOTS USED
RB-KAIROS+ MOBILE MANIPULATOR
Provided by

Training Curriculum
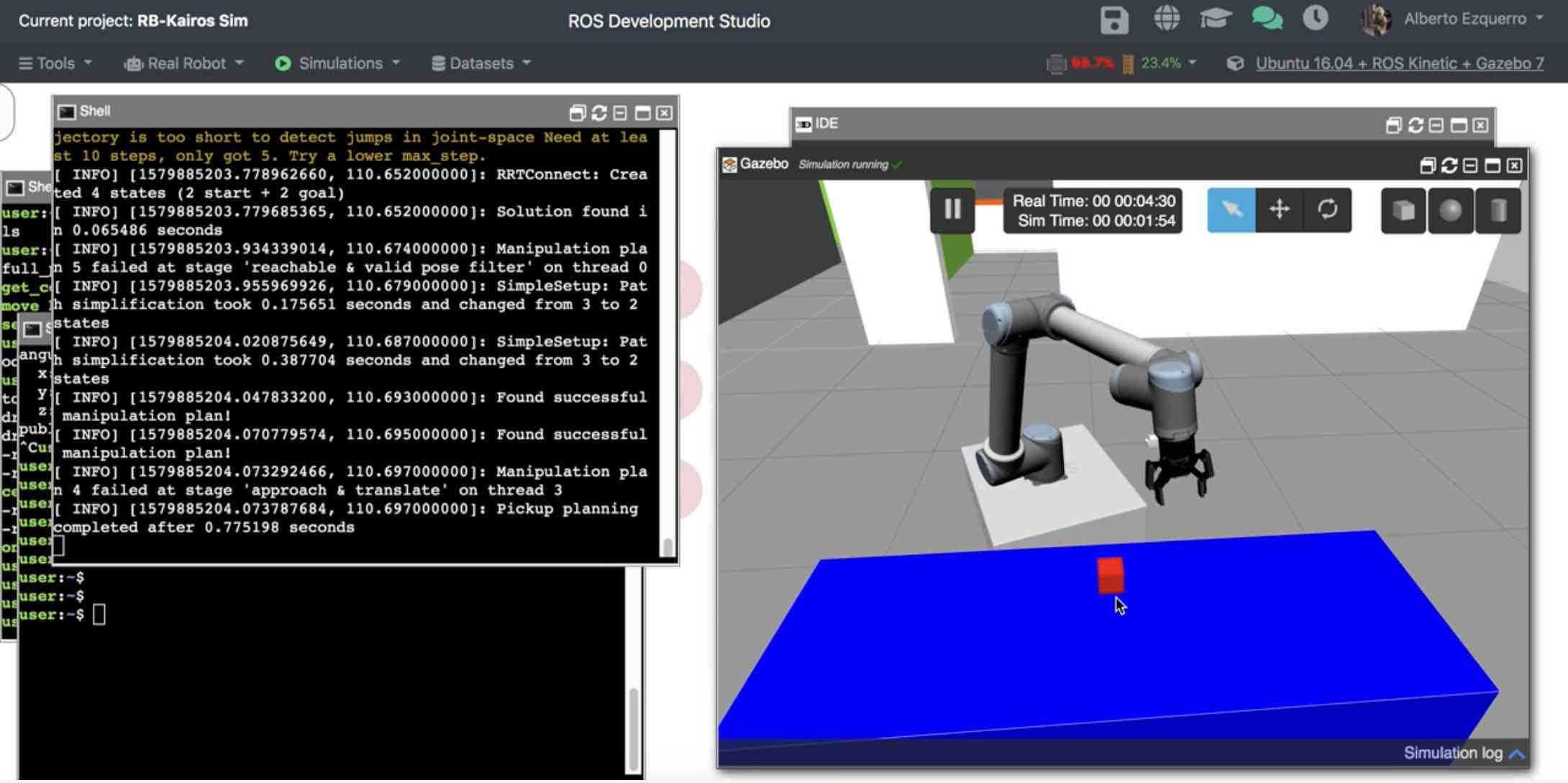
Chapter 4 - Grasping the Object
- Object detection
- Pick an object
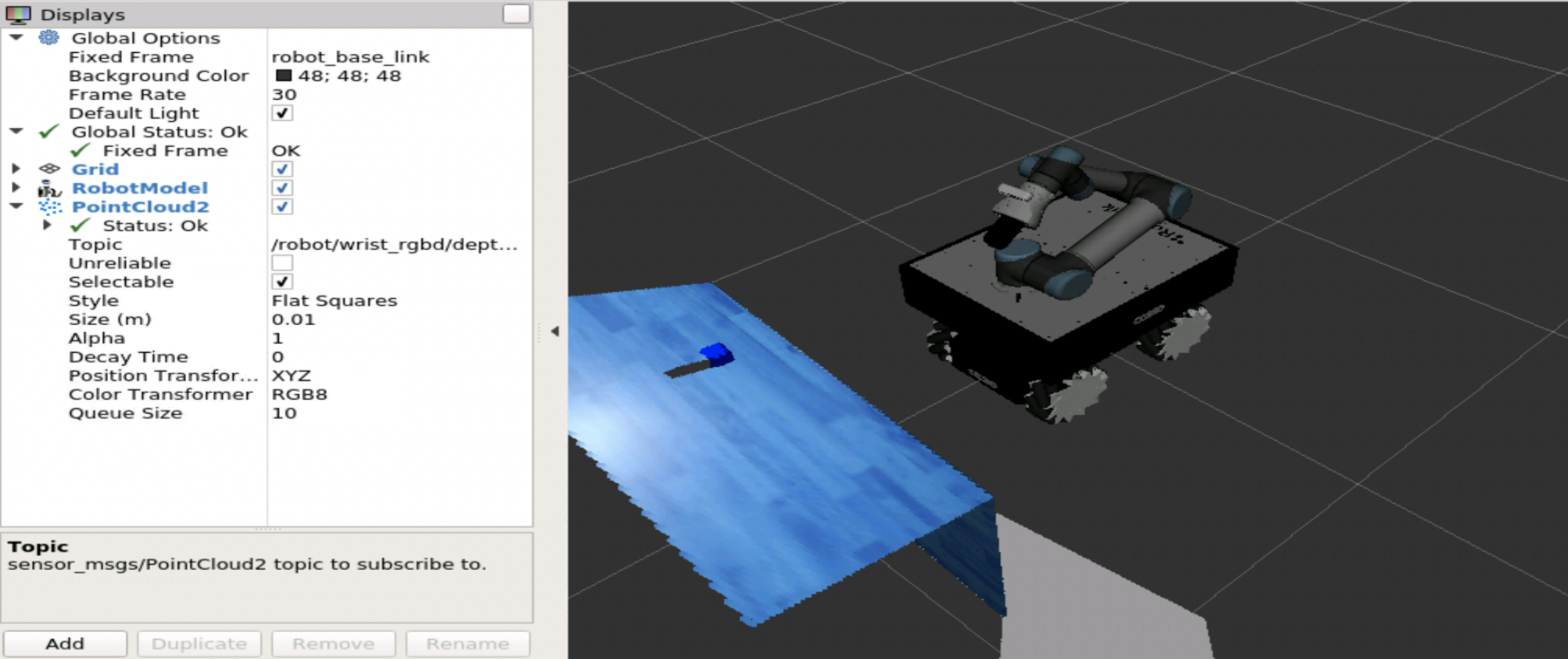
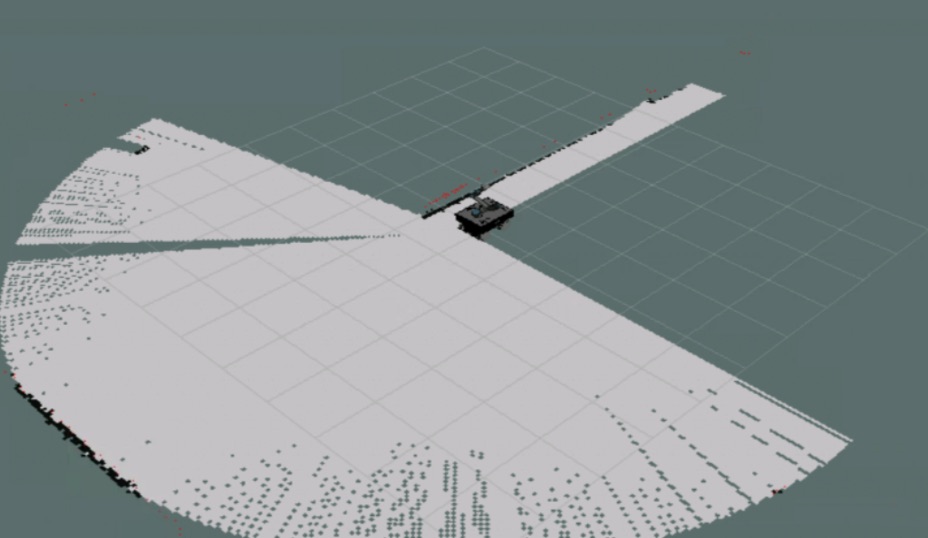
- Add perception to avoid obstacles
- Visualize the detections in RVIZ
- Create a pick & place task
Hands-on challenge: Make the arm grasp objects from the shelf while avoiding obstacles.
Chapter 6 - Design Web Interfaces for ROS robots
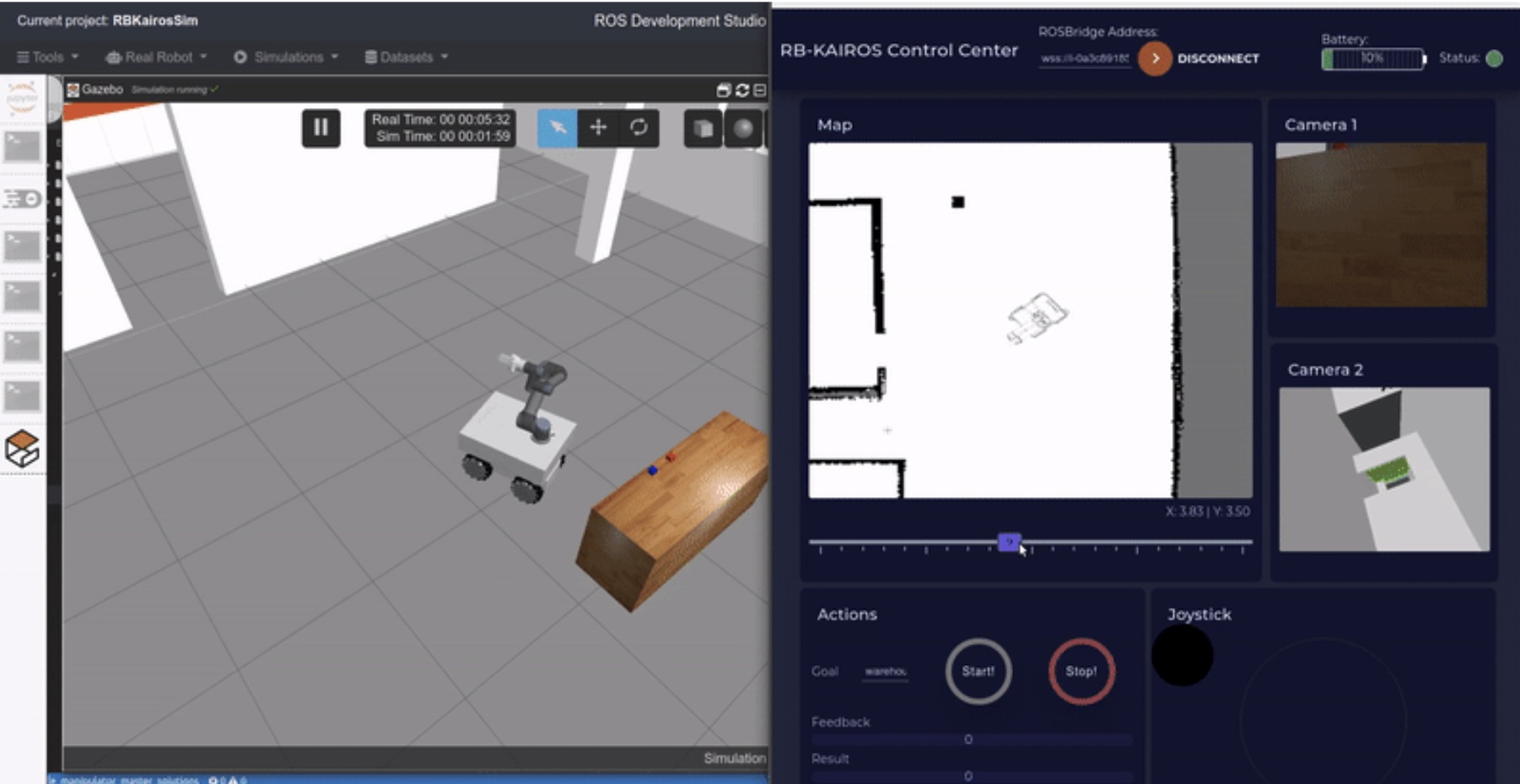 We will show you how to create a web interface for the robot. You will be able to see the navigation map and the robot camera, control the robot through a web joystick and start-stop the pick & place algorithm.
We will show you how to create a web interface for the robot. You will be able to see the navigation map and the robot camera, control the robot through a web joystick and start-stop the pick & place algorithm.
- Set up the server in the robot
- Create and run a web page that shows relevant robot information
- HTML and CSS on the web page
- Set up a JavaScript framework
- Understand the lifecycle of the web page
- Add an online Joystick to your web page
- Show the robot’s cameras on the page
- Show your custom map on the page
Hands-on challenge: Create a web interface for non-experts to command the robot, and know its status.
Chapter 7 - Real Robot Project: Make a Full Manipulator Application to Autonomously Clean a Space

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Get Certified
Upon completing this training, The Construct grants participants a shareable certificate of completion. This training is graded as a pass or fail; participants must receive 75% to pass and obtain the training completion certificate.

Your support team
We think you will be pleasantly surprised by the amount of support you have during the training.
Miguel Angel
Head of Research @ The Construct | Creator of over 10 ROS AI courses | Author of ROS IN 5 DAYS book collection

Alberto Ezquerro
Head of Education @ The Construct | Creator of over 30 ROS courses | Author of ROS IN 5 DAYS book collection

Ricardo Téllez
CEO @ The Construct | Teacher of Robotics at La Salle University and Universitat Politècnica de Catalunya

Rodrigo Gonzalez
Robotics Engineer @ The Construct | Leader of RoBox – 24/7 Remote Real Robot Lab
Testimonials
We Help You to Achieve Success

Perfection Went Above
A great training course and hands-on experience. I strongly recommend it to anyone who wants to learn ROS.

Brian L Merritt
Robotics Developer
A Hassle-Free Training
The training was focused on controlling real robots and not just in the simulation environment. I have upskilled with ROS! A huge thanks to The Construct for making the robotics learning hassle-free.

Ragesh Ramachandran
Robotics Researcher
Perfection Went Above
It was a lot of very useful knowledge and practice!

Robert Gruberski
Software Developer
Training Fees included
Hands-on experience with real robots
Expert instruction from industry professionals
Comprehensive curriculum
Access to a supportive community of like-minded learners
20+ hands-on exercises with simulated robots
6-month access to course content
Life-long access to the code developed during the training
Training Completion Certificate
Lunch & coffee break
WE ACCEPT
![]()
![]()
![]()
![]()
![]()
![]()
When
March 22 – 24, 2023 (Daily classes from 9:00 to 18:00)
Where
C. de Pallars, 101, 08018 Barcelona, Spain
Language
English
Seats
3 seats available out of 15
Registration Fee
3,099 €
Registration Deadline: March 16th, 2023
Enroll today to save your seat.
Day(s)
:
Hour(s)
:
Minute(s)
:
Second(s)
FAQ
Frequently Asked
+ What are the requirements for this training?
Prerequisite knowledge required:
For this training, you need to know the basics of Linux, Python, and ROS Basics. This is mandatory. If you need it, review the following three courses:
Equipment:
- A laptop (you can use Windows, Linux, or macOS)
- Google Chrome or Firefox browser
- Mouse
- It is not necessary to have Linux on your computer. Any operating system is valid.
+ What is the programming language used for the course?
Python in Linux
+ Do I need to install ROS in advance?
No. You only need to bring your laptop and connect to the internet. You can use Windows, Linux, or macOS.
+ Making a large group booking?
Group discounts are available when registering 5 or more participants. Please contact us directly at info@theconstructsim.com